
En los últimos años, la guerra antisubmarina (ASW por sus siglas en inglés) está recuperando el protagonismo de los años más candentes de la Guerra Fría. A pesar de que el medio apenas ha cambiado, la tecnología ha evolucionado de una manera inimaginable en estos últimos tiempos. Tanto es así que los submarinos son cada vez más silenciosos (llegando a emitir menos ruido que el ambiente), más potentes, más capaces acústicamente y pueden permanecer más tiempo al abrigo de las profundidades gracias a la propulsión anaerobia (también conocida como AIP). Esto, junto con la proliferación de los drones submarinos y que el acceso a los submarinos es cada vez más barato, y, por tanto, más marinas cuentan con ellos, ha provocado que la patrulla marítima esté recuperando el interés que nunca debió perder.
Acabada la Guerra Fría, las marinas europeas, al ver que la amenaza submarina soviética prácticamente se había desvanecido, se relajaron en exceso. De hecho, todavía continúa y, en parte, esa situación de falsa tranquilidad (por ejemplo, Países Bajos se deshizo a principios de los 2000 de sus aviones de patrulla marítima). Tanto es así que, como alertó el JAPCC (Joint Air Power Competence Centre) de la OTAN, la relación entre MPA y submarinos no aliados se ha reducido enormemente y va camino de seguir empequeñeciéndose [1]. Por su parte, los rusos, después de solventar los problemas de la clase Yasen y Borei, van sacando del astillero submarinos con una cadencia encomiable; apenas 18 meses por unidad. Mientras, la República Popular de China se encuentra avanzando en la construcción de submarinos más silenciosos.
Para contrarrestar estas amenazas, la OTAN propone en el mencionado documento profundizar, entre otras, en el multiestatismo, esto es, en el uso de técnicas multiestáticas. En concurso ideal con esto, los centros de pensamiento estadounidenses y la marina de dicho país llevan tiempo abogando por las operaciones distribuidas en el dominio marítimo (DMO, por sus siglas en inglés) [2,3]. Esta idea encuentra su máxima expresión en el lema «si flota, combate» (If it floats, it fights) [4]. Las últimas demostraciones de esta sentencia se han podido presenciar tanto en el ejercicio Summer Fury 21 dónde varios Bell UH-1Y Venom del Cuerpo de Marines estadounidense (USMC) lanzaron sonoboyas SSQ-53G DIFAR en colaboración con los Sikorsky MH-60R Seahawk de la USN [5] como en el ejercicio Winter Fury 22 donde un Bell-Boeing MV-22B Osprey desplegó una pantalla de sonoboyas AN/SSQ-53G DIFAR [6].
Aunque el concepto de operaciones marítimas distribuidas comprende también buques y submarinos tripulados, la parte más interesante, novedosa y desafiante son los sistemas no tripulados y su gestión. Tanto es así que pueden constituir una aproximación diferente, una alternativa para contrarrestar a la Armada del Ejército Popular de Liberación de China [7], la cual está experimentando un crecimiento exponencial en los últimos años.
Una vez introducidos, estos aparatos se clasificarán dependiendo del ambiente dónde trabajarán habitualmente: aeronaves remotamente tripuladas (UAV), barcos de superficie remotamente tripulados (USV) y vehículos submarinos remotamente tripulados (UUV).

Aeronaves Remotamente Tripuladas
De un tiempo a esta parte, se puede apreciar cómo los aviones remotamente tripulados están siendo protagonistas en la mayoría de los conflictos actuales. Características como alcance, persistencia y la posibilidad de ser pilotados desde barracones a miles de kilómetros suponen grandes ventajas con respecto a sus contrapartes tripuladas.
Como era de esperar, con el paso del tiempo están siendo introducidos en otros dominios del campo de batalla y parece que el marítimo será el próximo. Uno de los sistemas que más está apareciendo en las noticias es la plataforma aérea propuesta por la empresa norteamericana GA-ASI basada en el conocido MQ-9 Reaper.
En uno de los últimos comunicados [8] anunciaron con entusiasmo que habían sido capaces de detectar un señuelo del tipo Mk.39 EMATT (Expandable Mobile Anti-Submarine Warfare Training Target, Blanco Móvil Desechable de Lucha Antisubmarina) [9] en un ejercicio de pruebas llevado a cabo en un polígono de tiro naval. Para alcanzar este logro, fueron necesarias un total de 10 sonoboyas de tamaño A normalizado según normativa OTAN. La primera de ellas fue la encargada de obtener el perfil de temperaturas con respecto a la profundidad (traza batimétrica), y así poder configurar el patrón de siembra de las siete DIFAR (Directional Frequency and Analysis Recording) [10] que se utilizaron para cercar al blanco. El último paso se consiguió con el lanzamiento de otras dos sonoboyas activas DICASS (Directional Command Activated Sonobuoy System) [11] que permitieron fijar el objetivo.
El fabricante anunció que el número máximo de sonoboyas de tamaño A que puede portar el aparato es de 40 unidades [8]. Es decir, en este ejercicio preparado, se consumió un 25% de las sonoboyas que puede lanzar la aeronave (que podrían ser más si se despliegan sonoboyas a diferentes profundidades; p. ej. patrones profundos o poco profundos). Esto corrobora la idea de que las plataformas remotamente tripuladas están pensadas para trabajar bajo las órdenes de otra superior, encargada además de establecer la disuasión, es decir, la capacidad de lanzar un torpedo en caso de ser necesario.
Sin embargo, estos nuevos sistemas permiten tener una mayor capacidad de sonoboyas. Es conveniente mencionar que estos dispositivos siempre faltan; pues, como se ha podido comprobar, en un ejercicio controlado se han consumido 10 sonoboyas. Y en segundo lugar, permite que la plataforma principal, que constituye en sí mismo un activo de alto valor estratégico (High Value Unit, HVU) tanto por su coste como por la preparación del personal que va en él, pueda trabajar a una distancia segura de los posibles elementos hostiles.
Otro detalle quizá menos conocido, pero muy importante, es la necesidad de enlaces de datos con mayor ancho de banda para poder remitir la información recibida a la plataforma superior. Así como antes se resaltaba que el vehículo remotamente tripulado puede suministrar un mayor número de sonoboyas, ésta no es capaz de analizar la información acústica que recopilan los micrófonos submarinos.
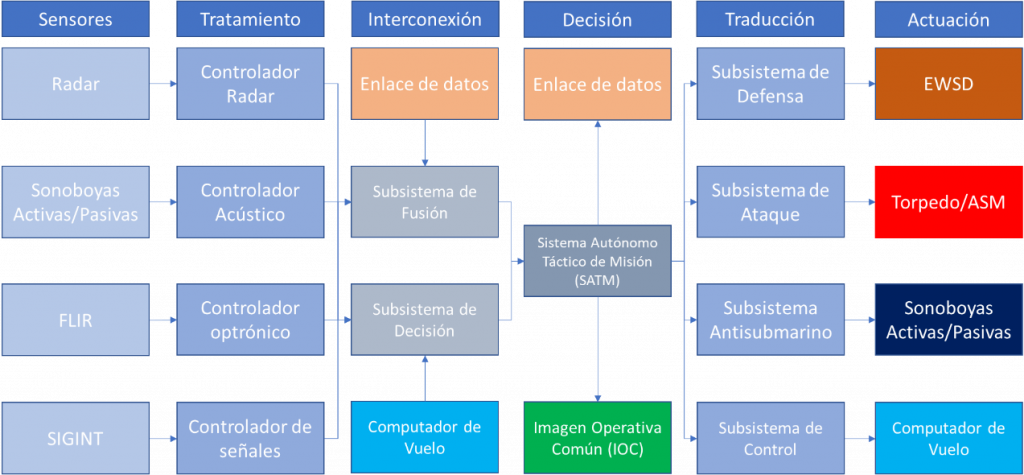
Para poder lograr esto, es decir, que las plataformas puedan analizar de manera autónoma la información que recopilan, se ha de acudir a las nuevas técnicas de procesamiento de datos y de algoritmos de ayuda a la decisión. Antes de continuar, es conveniente recordar que las plataformas de patrulla aeromarítima tienen como objetivo principal la obtención tanto de una Imagen Operativa Común (IOC) como de una Imagen Táctica Común [12]. La composición de este cuadro instantáneo se logra fusionando la información que recopila cada uno de los sensores del avión.
En primer lugar, el sensor infrarrojo de exploración frontal (Forward-Looking Infrared, FLIR) se encarga de la captación de imágenes tanto en tiempo real como en distintos espectros (visible, SWIR…), lo que permite obtener imágenes de gran calidad a distancias considerables aún en condiciones de baja iluminación.
En segundo lugar, los sensores electrónicos que componen las medidas de apoyo electrónico (Electronic Support Measures, ESM) permiten captar completamente las señales electromagnéticas para, de esta forma, obtener información tanto de las comunicaciones interceptadas como de las emisiones de ondas de radar. Además, es importante resaltar que estos equipos pueden colaborar para conocer el estado del espacio electromagnético y notificar si existen perturbadores en las cercanías de la zona de misión. Esto es vital puesto que pueden anular, por ejemplo, el enlace entre las sonoboyas y la plataforma.
Por último, los sensores acústicos, como son las sonoboyas pasivas y activas, permiten detectar las ondas sonoras que se propagan en ese preciso instante en las profundidades del océano. Como se puede deducir, las primeras se encargan exclusivamente de captar los sonidos que se propagan por el medio, mientras que las segundas emiten una onda sonora y reciben y procesan su eco, como es el caso de la SSQ-62 DICASS, o sólo emiten, como la SSQ-125 ADLFP (pensada para trabajar con tecnología activa multiestática coherente, MAC, donde el elemento receptor es una malla de sonoboyas pasivas y otros sonares, de un buque, por ejemplo) [13].
Una vez se han detallado las tres fuentes principales de información, se debe considerar la creación de un Sistema Autónomo Táctico de Misión (SATM) capaz de analizar cada uno de los paquetes que llegan. Y, si dicho software es completamente autónomo, de clasificarlo, así como remitir al Centro de Mando y Control el producto de inteligencia o, dependiendo del grado de autonomía, tomar las acciones que considere oportunas.
Para que el SATM pueda ser más eficaz; en este último paso, el software debe identificar si la información que llega por distintas vías corresponde a un mismo elemento, ya sea hostil o no. De esta forma, el sistema, en tiempo real, generará un objetivo que será designado como MIKE 1 (M denota MÁSTER, que se utiliza cuando un objetivo aparece en más de un sensor; denotándose el objetivo captado por el sonar, SIERRA X; a través del periscopio o sistema FLIR, VICTOR X; por el radar, ROMEO X, y a través de las medidas de apoyo electrónico ECHO, X; siendo X el orden de aparición, 1, 2, 3…) y que deberá contener (casi) todos los rasgos que le caracterizan, es decir, firma acústica (por ejemplo, un lofargrama), firma infrarroja o visible (una fotografía en cualquiera de los espectros, esto es sumamente complejo puesto que la forma de un buque cambia con respecto a la posición relativa entre el observador y el objetivo, así como el momento en el que se toma la captura) y, por último, una firma radar (que bien podría ser el eco que el buque devuelve o el debido al clasificar las emisiones de su radar de exploración aérea, lo cual identificaría una clase no un buque en concreto).
De esta forma, con estas 3 características, -que podrían ser más, puesto que los buques también producen una señal eléctrica y una señal magnética-, una base de datos extremadamente grande, y un ordenador lo suficientemente potente, se podría proceder a la clasificación del objetivo con un grado de confianza superior al que actualmente se puede alcanzar o, al menos, presentar al operador una posible clasificación en menor tiempo.
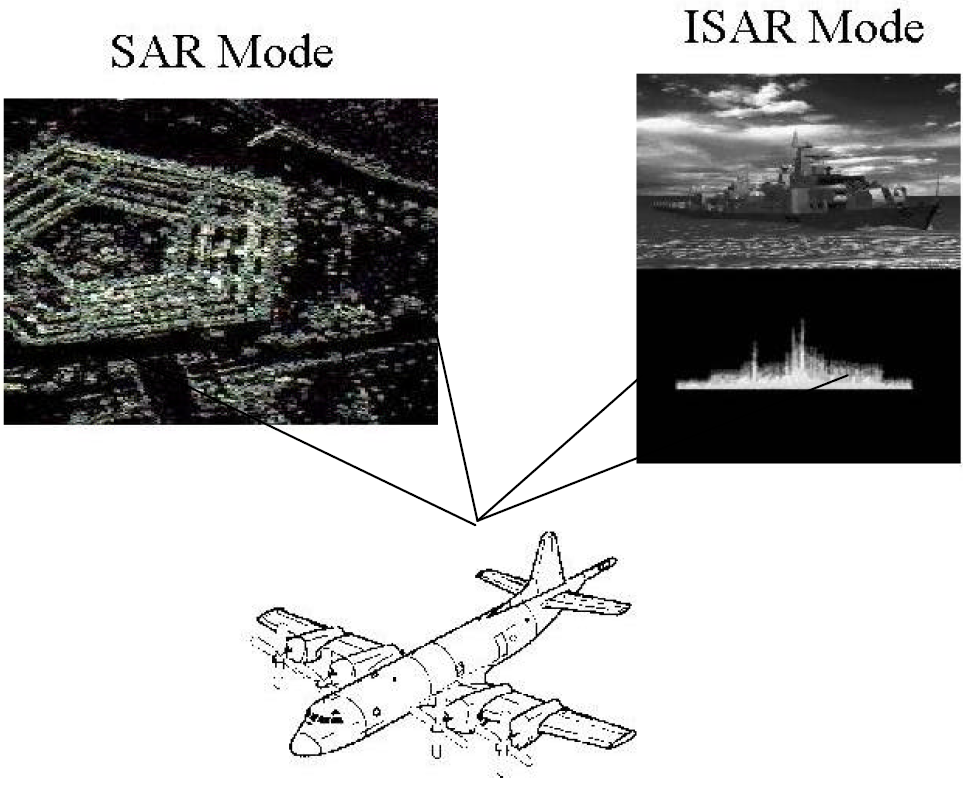
Entrando un poco más en detalle con respecto a estas tres firmas, la firma infrarroja de un buque que, dependiendo de la tecnología del receptor puede ser infrarroja o de imagen infrarroja (si en lugar de un sensor se cuenta con varios distribuidos en forma matricial), es actualmente un sensor muy importante debido a que es pasivo y ofrece una buena precisión. Asimismo, dentro del espectro infrarrojo, el intervalo más prometedor se corresponde con la onda corta (entre 0,9 y 1,7 micras) puesto que en dicho rango, el comportamiento de la luz es prácticamente similar al visible, cosa que no ocurre en el infrarrojo de onda media ni en el de onda larga [14].
Por su parte, la firma de radar se puede construir de dos formas dependiendo de si se hace de manera activa (utilizando el propio radar) o de manera pasiva (sirviéndose de equipos de apoyo electrónico, ESM). Por un lado, se obtiene la forma del buque (a partir de los ecos de la emisión radar y usando técnicas conocidas como radar de apertura sintética, ISAR o CSAR). Por otro, se puede deducir la posición del buque, utilizando técnicas de triangulación, mientras que mediante el análisis de las señales recibidas se podrá determinar el equipo o equipos emisores, principalmente radares de exploración aérea. Siempre que, claro, se disponga de una base de datos debidamente actualizada que permita contrastar la información captada.
Como se puede deducir, de los buques de superficie se pueden obtener estas tres firmas, pero no de un submarino de propulsión nuclear o anaerobia navegando en inmersión. Para detectarlo, será preciso focalizar el trabajo en los sensores acústicos (en otras palabras, un submarino no hará emersión si no es una situación de emergencia). Al igual que antes y, puesto que estas técnicas son más antiguas y, por tanto, menos clasificadas, se propondrá una modificación de la aproximación clásica o de camino directo (direct path, [16]). De esta forma, se comienza con el lanzamiento de una sonoboya SSQ-36B para la obtención del perfil de temperatura con respecto a la profundidad (traza batimétrica), acto seguido la computadora estima rápidamente cuál es la profundidad de la termoclina y el perfil estimado de velocidades de propagación del sonido (traza baticelerimétrica). Con estos datos y un algoritmo de ayuda a la decisión, el Sistema Autónomo Táctico de Misión diseñará el patrón de siembra de las sonoboyas. Dicho esquema podrá ser una adaptación de otro anterior creado por un humano o supervisado. Así pues, el propio sistema podría ser capaz de optimizarlo dependiendo de las estimaciones de alcance y velocidad del blanco, así como de otros factores que puedan ser confidenciales y jueguen un papel importante.
Con objeto de simplificar, supóngase que SATM se decanta por un patrón en forma cuadrada compuesto por 5 columnas con 5 filas cada una, es decir, 25 sonoboyas AN/SSQ-53 DIFAR separadas tanto en dirección vertical como horizontal una distancia proporcional a la velocidad del submarino (para un submarino de ataque nuclear se puede suponer una velocidad de patrulla de 20 nudos; mientras que para uno convencional, 8 nudos).
Una vez que se han plantado las boyas y todas han notificado al aparato que se han desplegado adecuadamente, SATM procede a escuchar las 25 sonoboyas esperando que el fantasma haga acto de presencia. Normalmente, en estas búsquedas se parte de un área conocida en el argot como datum [16], que representa una zona de probabilidad que aumenta con el tiempo desde el posible contacto inicial (dependiendo de la velocidad del submarino). Tanto es así que el área de incertidumbre acostumbra a ser una zona terriblemente extensa, por lo que es bastante probable que la zona dónde se ha elegido sembrar quede fuera de la derrota del submarino.
En este caso, se supone que, a los diez minutos aproximadamente, el analizador acústico del SATM comienza a registrar valores altos de presión sonora en determinadas frecuencias. En la imagen siguiente, se puede apreciar un diagrama en cascada (también conocido como diagrama de banda estrecha) que representa la frecuencia con respecto al tiempo. A medida que transcurre, el último barrido de frecuencia aparece en la parte superior.
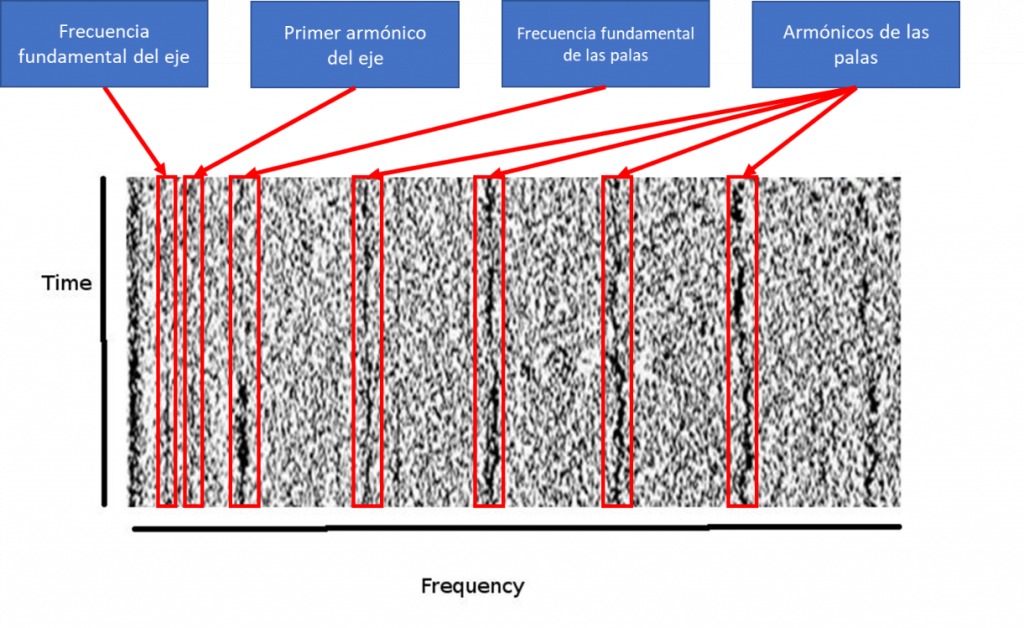
Como se puede observar, hay ocho líneas bien diferenciadas entre las que se encuentran: la frecuencia fundamental del eje del motor de, supóngase, un buque; el primer armónico del eje, la frecuencia fundamental de las palas, un grupo de cuatro armónicos; y, por último, otro armónico más separado que parece corresponder a un segundo grupo de cuatro armónicos. Al ser los grupos de cuatro armónicos se presupone que el buque representado cuenta con una hélice de cuatro palas. Antes de continuar, estos gráficos actualmente se representan en pantallas de ordenador, pero antiguamente (en los equipos AN/AQA-3/4, -5 y -7) no se utilizaba tinta, sino que se recurría a papel termosensible, el cual se quemaba más o menos dependiendo del nivel de presión sonora medido.
Tal y como se ha podido comprobar, tanto el oído como el ojo humano son capaces de detectar con relativa dificultad los objetivos y discriminar el resto de sonidos que reverberan en la mar. Pero ¿cómo hacer que esta tarea la lleve a cabo un sistema computacional?
Por esta razón, es importante recordar que es necesario establecer un discriminante robusto y eficaz para poder identificar esos valores altos de presión sonora en cualquier situación acústica. Esto es de vital importancia cuando se trabaja en entornos muy ruidosos y reverberantes como puede ser el ambiente litoral o entornos donde el tráfico mercante es numeroso (los camarones pueden generar importantes pantallas sonoras e impedir la detección en un cierto sector [18]). Así, dependiendo de la zona de trabajo y del tamaño del contenedor del sensor se optará por baja, media o alta frecuencia.
En estas situaciones, típicas del ambiente litoral, el coeficiente de señal frente a ruido se reduce considerablemente y el sistema debe ser capaz de evitar que, por ejemplo, se generen dos objetivos cuando realmente sólo existe uno (esto puede ocurrir debido a los distintos caminos que toma el sonido cuando emana de una fuente de ruido). Una de las aproximaciones puede ser la creación de ventanas temporales y de frecuencia, analizando solamente un intervalo de frecuencias y/o tiempo.
Una vez que se ha establecido el contacto y el sistema lo clasifica como algo humano, es decir, se aprecian, muy a grandes rasgos, transitorios y por tanto, se puede descartar que sea biológico, el subsistema ha de transferir esta información a la parte encargada de componer la imagen táctica.
Antes de continuar, es conveniente recordar los distintos niveles de confianza. De menor a mayor [19, 20]:
- NONSUB (Nonsubmarine): no existen pruebas de que el contacto sea un submarino.
- POSSUB (POSsible SUBmarine): es un contacto cuya información disponible indica la posible presencia de un submarino, pero la carencia de evidencias impide una mayor clasificación. Este nivel debe ir siempre acompañado de una evaluación del nivel de confianza:
- Nivel bajo: un contacto que no puede ser caracterizado como un no submarino y que requiere mayor investigación.
- Nivel alto: un contacto del que, por la información disponible, se cree firmemente que es un submarino pero no cumple los requisitos para ser clasificado como PROBSUB.
- PROBSUB (PROBable SUBmarine): un contacto que muestra numerosas pruebas claras de que es un submarino. Dicha clasificación se fundamenta en la evaluación de los datos provenientes de uno o varios sensores.
- CERTSUB (CERTain SUBmarine): un contacto que ha sido visto e identificado positivamente como un submarino.
Una vez alcanzado POSSUB, comienzan a entrar en juego las técnicas de análisis del movimiento del blanco (Target Motion Analysis, TMA) que suelen estar basadas, mayormente en cálculos de trigonometría [21]. Esta parte es fundamental puesto que hay que determinar, o predecir en la medida de las posibilidades, la posición, el rumbo y la velocidad del objetivo y así estimar la posición futura del buque enemigo con respecto al propio. Esto es absolutamente necesario para, en caso de ser preciso, poder pasar a la fase de ataque y neutralización de la amenaza.
La última parte es común para las tres vías de información a las que se hizo alusión anteriormente. El trabajo de campo que se ha de realizar antes de que esto sea una realidad es enorme. No sólo consiste en salir con un sensor y una grabadora de datos sino que también se han de tener los conocimientos adecuados para poder indicarle al ordenador qué firma corresponde a qué buque. Y, cómo no podía ser de otra manera, asegurarse de que los datos a tratar presentan la calidad suficiente.
De esta forma, a partir de dicha información y de lo redactado dos párrafos atrás se pueden introducir acciones en el algoritmo como por ejemplo: lanzar más sonoboyas, en qué dirección y a qué distancia entre sí y que estas decisiones se tomen dependiendo de un peso que se calcule en base a toda la información que haya ido recopilando el sistema durante la misión y la experiencia alcanzada en las patrullas anteriores. Además, también se debe contemplar la posibilidad de que el SATM recomiende nuevas rutas optimizadas.
No obstante, este sistema debe ser determinista. Es decir, si se introducen los mismos datos en distintos intervalos de tiempo, la respuesta deberá ser siempre predecible por una persona.
Por los motivos anteriormente expuestos es un asunto de primera necesidad para las Fuerzas Armadas, tanto el diseño como la construcción o bien, la adquisición de equipos y sistemas capaces de construir esta base de datos necesaria para que, en un futuro no muy lejano, los aviones de patrulla aeromarítima puedan trabajar con un alto grado de autonomía.
Tanto es así, que actualmente la US Navy cuenta con un equipo encargado de generar aplicaciones y herramientas que permiten desarrollar de manera rápida y eficaz las capacidades del sistema táctico de misión del Boeing P-8A Poseidón. Tienen su base en la estación naval de Jacksonville y se esconden tras el nombre iLoc Development Team [22,23].
Aunque durante la preparación de este documento, se descubrieron distintos programas focalizados en torno a la optimización de la guerra antisubmarina, como ASW eFusion [24], no son comparables en términos de envergadura a los programas que están desarrollando el equipo que se encuentra en Jax. Esto se debe principalmente, al cambio de mentalidad que está llevando a cabo la USN en los últimos tiempos, poniendo todo su empeño en reducir los tiempos de actualización de software al mínimo [22], así como modificar el ciclo de generación del mismo, centrándose en la filosofía empleada en los terminales inteligentes con las distintas aplicaciones disponibles en las tiendas digitales.
Volviendo a los aviones remotamente tripulados, hasta que se tenga la posibilidad de operar los drones con cierta autonomía, estos sistemas se pueden emplear en el patrullaje de las zonas dónde se encuentren los cables submarinos. Últimamente, no han sido pocas las apariciones que han protagonizado, puesto que por ellos circulan gran parte del tráfico de información entre los distintos lugares del planeta.
Uno de los incidentes más peligrosos (no el que más) es que un submarino los corte [25]. Aunque, en este caso, el tráfico se podría recircular rápidamente por otros nodos de manera que la pérdida de conexión sea momentánea pues, actualmente hay tendidos numerosos cables submarinos. No obstante, el coste de reparación de éstos es lo suficientemente restrictivo como para, en caso de guerra, obligar a descartar la posible restitución del servicio.

Por otro lado, en este campo también tendrán su papel los helicópteros remotamente tripulados como el MQ-8C Scout (o aeronaves de rotores basculantes como el Bell V-247) que serían capaces de desplegar conjuntos de sonoboyas o aportar información al mando a partir de sus sensores no acústicos como el radar AN/ZPY-8 en este caso [26, 27] o como su hermano, el MQ-8B que recientemente participó en una misión SAR en colaboración con un MH-60S [28]. En este mismo sentido, y con plataformas más económicas como los populares drones de cuatro hélices, se pueden introducir nuevos aparatos capaces, por ejemplo, de lanzar torpedos más ligeros que los actuales de 324 mm o de calar sonares ligeros. De esta forma se reduce el coste de operación y se aumenta la flexibilidad de la misma, pues se podrían desplegar varios drones con sonar calable que trabajasen en enjambre. Asimismo, otra propuesta interesante es el uso de los cañones navales de 127 mm para desplegar una barrera de cargas de profundidad como herramienta alternativa para enfrentarse a la creciente amenaza de drones submarinos [29].

Por su parte, la República Popular de China se encuentra desarrollando también una versión del conocido drone CAIG (Chengdu Aircraft Industry Group) Wing Loong II (翼龙 II, traducido como Pterodáctilo-II) para misiones de patrulla aeronaval. Como no podía ser de otra forma, hizo acto de presencia en la última edición de la Feria de Zhuhai. Se cree que la denominación es WL-2F [30]. De cualquier manera, la idea parece que es bastante similar a la desarrollada por General Atomics – Aeronautical Systems (GA-ASI) en el MQ-9B Sea Guardian [8] y que estaría compuesta por un radar de búsqueda de superficie, un par de contenedores de sonoboyas y una cámara FLIR. En la feria portaba también un contenedor de perturbación electrónica y un misil guiado LS-6/100NLS [31]. Es posible que estos dos últimos elementos solo estuviesen con propósitos demostrativos, pues no tiene sentido montar un pod de autodefensa y no contar con un contenedor para la recepción de las señales emitidas por las sonoboyas para su posterior emisión al centro de operaciones. Asimismo, se aprecia también que los contenedores de sonoboyas son extremadamente delgados en comparación con los estadounidenses. En la misma feria apareció un vehículo submarino remotamente tripulado bajo un drone CH-6 que se tratará en el último epígrafe de este texto.
Por último, a pesar de que no se ha hecho mención pública en ninguno de los comunicados emitidos, es lógico pensar que se desarrollará una versión naval del EuroMALE [32]. La información, por desgracia, es muy escasa, pero suficiente para elaborar una pequeña estimación. Por un lado, ofrece una permanencia en zona entre 16 y 20 horas (dependiendo de la carga) a 500 millas de la base [33]. Mientras que la carga útil es de 2300 kg como máximo [34] lo que permitiría instalar (de manera holgada) un conjunto de sensores EUROFLIR 610 [35], un radar de búsqueda de superficie de la familia Seaspray de Leonardo [36], una veintena de sonoboyas (por ejemplo, 2 batitermográficas, 8 DIFAR, 8 ADAR [37] y 2 ADLFP con sus respectivos lanzadores [38]) y dos torpedos Mk54 [39].

Barcos de Superficie Remota o Mínimamente Tripulados
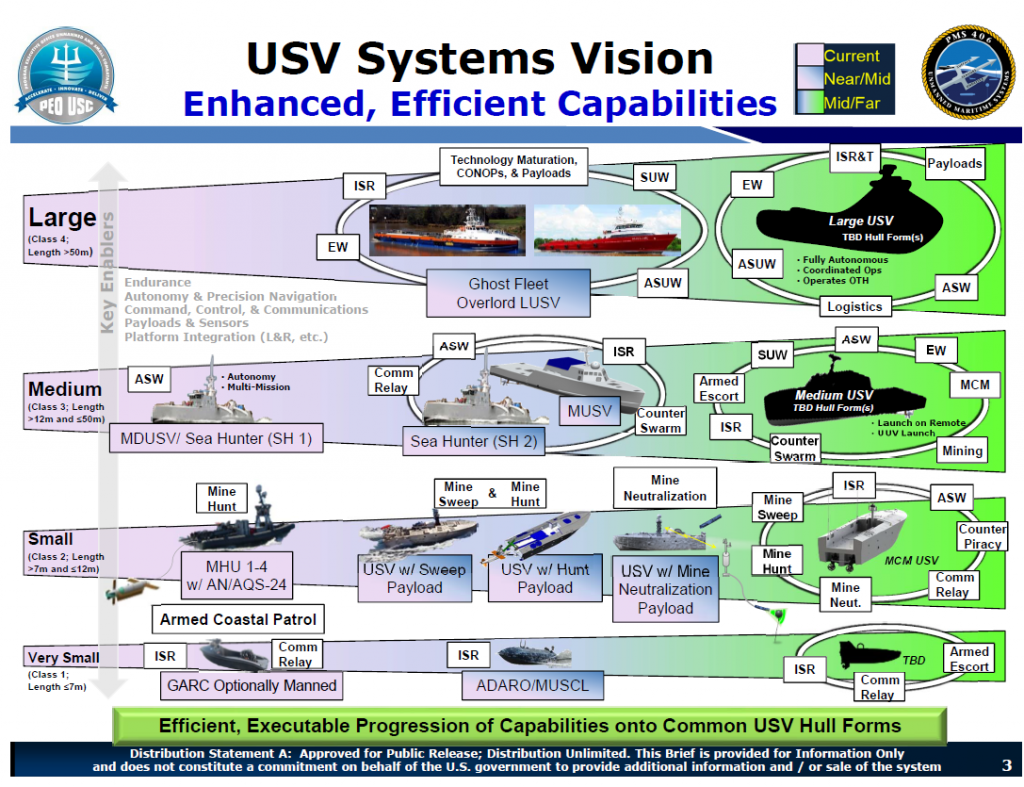
En los últimos años, estos sistemas están empezando a tomar protagonismo. Aunque todavía se encuentran en pañales, las expectativas son muy grandes. Entre otras misiones serán capaces de llevar a cabo tareas tanto para patrulla marítima como para recolección de información, minado y desminado o lanzamiento y recogida de drones submarinos, protección de unidades principales o de puntos de interés como estrechos, etcétera [40, 41].
Al igual que todo sistema a diseñar, su tamaño vendrá determinado por el uso que se le vaya a dar o los requisitos que se le vayan a exigir. De esta manera, los drones pequeños y medianos trabajarán preferentemente en aguas litorales y permitirán cargas útiles comedidas y alcances no excesivos, pero lo suficiente como para alejarse una cierta distancia del buque nodriza o puerto base. Dichos sensores quizá no ofrezcan el alcance suficiente, lo que se compensará desplegando un mayor número de unidades [42].
Caso contrario ocurre con las naves de superficie remotamente tripuladas cuyas misiones impliquen trabajar en aguas oceánicas, recorrer grandes distancias o transportar cargas muy voluminosas como sucede con los prototipos desarrollados a través del programa Ghost Fleet Overlord de la Oficina de Capacidades Estratégicas (SCO) del Pentágono [43, 44].
Del mismo modo, estas embarcaciones dependiendo de su tamaño contarán con mayor o menor cantidad de sensores. Quizá los esenciales sean un radar de navegación y un conjunto fotónico que ofrezca imágenes al Mando en casi cualquier condición. Igualmente, si su misión es antisubmarina, contará con un sonar, preferiblemente remolcado, descartándose tanto el de casco por el ruido propio del agua al incidir sobre el grupo de hidrófonos como el calable puesto que es más eficaz una patrulla algo más lenta pero con el sonar siempre desplegado [42]. En caso de que sea posible se instalarán armas como ametralladoras remotamente tripuladas, lanzadores de misiles o torpedos como se verá más adelante.
Antes de comenzar a explicar algunos modelos en desarrollo (o comenzando su producción) hasta la fecha, es preciso mencionar un tema interesante a la vez que complejo y que también afecta a los UUV [46]. Como bien es sabido, los drones aéreos llevan muchos años en servicio, por lo que la cantidad de personal necesaria para operarlos es de sobra conocida y los planes de formación del mismo se encuentran perfectamente asentados. Caso contrario ocurre con los drones de superficie y submarinos donde todavía no se encuentran desarrollados. De hecho, tampoco se conoce con exactitud cuánto personal es necesario para operarlos ni cómo se ejecutarán las tareas requeridas.
En el artículo [46] se presenta un estudio con vistas al programa SSN(X) (desarrollo del sustituto para los submarinos clase Virginia de la US Navy) en el que se estima el número de militares necesario dependiendo de la situación (paz o conflicto), del grado de autonomía del aparato (se distingue entre pilotar, controlar o supervisar; a mayor tamaño, mayor responsabilidad y previsiblemente menor autonomía), etcétera. Este último factor se acentúa en los vehículos UUV pues la posibilidad de comunicación entre ellos o con el barco nodriza (ya sea de superficie o submarino) se reduce considerablemente por el medio, por lo que la autonomía será indudablemente mayor.
Asimismo, la USN ya cuenta con dos escuadrones especializados en vehículos remotamente tripulados (UUVRON 1 y SURFDEVRON 1). Cabe mencionar también la existencia del primer mando operacional de la marina estadounidense encargada de trabajar de manera conjunta con distintos sistemas no tripulados, la Task Force 59, destinada en el área de responsabilidad de la 5ª Flota [46]. Por último, los autores también reflexionan acerca de cómo y quién operará los futuros UUV en la próxima clase SSN (X). A grandes rasgos, se contemplan dos posibilidades, o bien crear unidades especializadas que suministren destacamentos con personal encargado exclusivamente del drone (lanzamiento y recuperación, supervisión, mantenimiento…) o bien hacer que la propia dotación del barco absorba dichas tareas.
(Continúa…) Estimado lector, este artículo es exclusivo para usuarios de pago. Si desea acceder al texto completo, puede suscribirse a Revista Ejércitos aprovechando nuestra oferta para nuevos suscriptores a través del siguiente enlace.
IMPORTANTE: Las opiniones recogidas en los artículos pertenecen única y exclusivamente al autor y no son en modo alguna representativas de la posición de Ejércitos – Revista digital sobre Defensa, Armamento y Fuerzas Armadas, un medio que está abierto a todo tipo de sensibilidades y criterios, que nace para fomentar el debate sobre Defensa y que siempre está dispuesto a dar cabida a nuevos puntos de vista siempre que estén bien argumentados y cumplan con nuestros requisitos editoriales.
1 Comment