

La defensa C-UAS no se concibe sin la participación de toda una serie de sensores que, actuando en solitario, o bien colaborando entre sí, permiten a los sistemas antidrón y a sus operadores disponer de una correcta conciencia situacional. Con suerte, también de tiempo suficiente como para tomar la decisión más adecuada de cara a la neutralización o mitigación del UAS hostil. Si bien hay sistemas de detección que han ido quedando relegados a un segundo plano, como los acústicos, otros están viviendo un desarrollo sin parangón, materializado en la aparición de un número sin precedentes de modelos y tipologías, en busca de dar una respuesta adecuada a la amenaza que plantean los drones. Pese a lo cual, todos presentan deficiencias que pueden ser explotadas.
Si en la primera parte de esta serie de artículos nos centramos en exponer los conceptos básicos relacionados con la defensa C-UAS, la segunda la dedicaremos íntegramente a hablar de los sensores implicados en la misma, desde los detectores de radiofrecuencia a los radares, pasando por los detectores acústicos o los sistemas LiDAR. También, pues no podría ser de otra forma, a los electroópticos, estos últimos tan en boga últimamente, especialmente ahora que son varias las empresas que trabajan en combinarlos con algoritmos de inteligencia artificial.
En relación con esto, y antes de entrar en materia, conviene aclarar que por distintos motivos, como la difusión que viven los drones comerciales letalizados, sUAS o como queramos denominarlos, son demasiadas las ocasiones en las que las tropas sobre el terreno no cuentan con la ventaja de disponer de sensores de ningún tipo, más allá de sus ojos y oídos. Hasta que no se desarrollen sensores del tipo que sea más baratos y susceptibles de ser producidos en masa, esta situación seguirá siendo habitual.
Dadas, además, las características de drones como los FPV, con su pequeño tamaño, sigilo y maniobrabilidad extremas, las unidades -del tipo que sean, aunque especialmente las que van montadas- seguirán mostrándose muy vulnerables, especialmente en campo abierto. Y no solo en campo abierto: no hay más que atender a la cantidad de vídeos en los que drones atacan el interior de las posiciones defensivas, por enrevesada que sea su disposición, posiciones ocupadas por francotiradores, vehículos en marcha o el interior de edificios a través de una pequeña ventana, para entender que sería necesaria una cobertura total para poder detectar cada amenaza, algo imposible.
Esto nos plantea un primer dilema en cuanto a la defensa C-UAS, ya que debe ser eminentemente local, lo que implica multiplicar el número de sensores. Algo que, ya de entrada, la diferencia notablemente de la defensa aérea tradicional. En este caso, cuando hablamos de la defensa aérea de un país como España, parece adecuado establecer una red de puntos de vigilancia constituidos por los Escuadrones de Vigilancia Aérea (EVA), dependientes del Mando Aéreo de Combate (MACOM) y complementados por los radares a bordo de buques como las F-100. Del mismo modo, cuando se trata de proteger a la Fuerza en sus maniobras, parece también lógico apostar por una amalgama de sistemas que permitan establecer una defensa en capas.
Es así, en tanto en el caso de los bombarderos y cazabombarderos, al menos hasta la irrupción de los de quinta generación, con sus capacidades furtivas, presentan una elevada superficie de reflexión al radar, lo que permite su detección a grandes distancias. Son aparatos grandes que vuelan, salvo puntualmente, a cierta altitud. Es más, incluso los bombarderos y cazabombarderos stealth pueden ser localizados, al menos a corta distancia, mediante el recurso a complejos como el ruso Nebo-M, que combinan diferentes radares que operando en diversas bandas de radar, desde el VHF a L, X, S, o C. De ahí que en cierto modo estemos asistiendo a la muerte prematura de ciertas plataformas, como demuestran las pérdidas rusas de aviones de alerta temprana y mando y control (AWACS) Beriev A-50 «Mainstay».
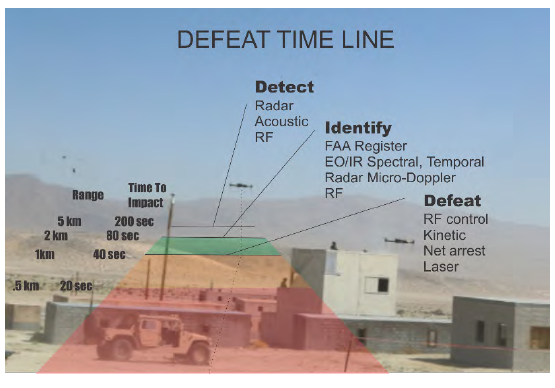
El problema es que, para lo que concierne a los drones de pequeño tamaño, reproducir un esquema como el anterior que sea realmente viable es por el momento, imposible, aunque hay formas de mitigación. Así las cosas, la “alerta temprana” contra UAS de pequeña tamaño queda en manos de los equipos de corto alcance situados tanto protegiendo las instalaciones fijas (civiles y militares) que se considere oportuno como, en el caso de la milicia, las bases móviles y las tropas en su avance. Equipos que intentan adaptarse contra una amenaza frente a la que no cabe ni hacer sucesivos lanzamientos de misiles de distintos alcances ni, por supuesto, un scramble. No podría hacerse en ningún caso, pues no hay largas distancias que proteger. En el mejor de los casos, entre el punto de partida y el objetivo median una quincena de kilómetros, que se recorren en un periodo de entre tres y ocho minutos, en función de la velocidad del dron. Velocidad que, por cierto puede oscilar entre 25 y hasta 50 metros por segundo, llegando incluso algunos aparatos a superar esas cifras, aunque no sea para nada habitual.
Es más, es tan complejo completar a tiempo el ciclo de decisión (sobre el que hablamos en la primera parte), que algunas de las estrategias de mitigación que vemos en el campo de batalla son copiadas, literalmente, de la lucha C-IED (de hecho, varios de los fabricantes de jammers lo son también de inhibidores de frecuencias contra explosivos detonados a distancia, como ocurre con la española ATL Europa) multiplicándose el número de jammers instalados a bordo de las plataformas (de todo tipo) o recurriéndose a nuevas formas de blindaje, como los famosos cope-cages o cúpulas, además de generalizándose el blindaje reactivo hasta límites en ocasiones inusitados.
En cualquier caso, y en lo que concierne a los sensores, lo relevante aquí es que también hay por el momento una diferencia notable entre las capacidades y coste de estos, sean del tipo que sean, y la evolución vivida por la amenaza. Hasta que esto no se solucione, posiblemente la mejor forma de terminar con la amenaza de los drones enemigos no pase por el escudo, sino por la lanza. Esto es, disponiendo de más y mejores drones que el contrario, así como de otros medios como la artillería o la aviación que puedan atacar las posiciones desde las que son empleados, los talleres o los almacenes.
Defensa C-UAS: sensores activos
Lídar
Un Lídar o LiDAR (Light Detection and Ranging o Laser Imaging Detection and Ranging) es un dispositivo que emite haces láser, midiendo el tiempo hasta la recepción del mismo una vez se refleja en el objeto a localizar. En los últimos años han ganado una enorme popularidad tras su generalización en el mundo de la automoción, en donde permiten a los coches autónomos identificar objetos. También se han comenzado a aplicar a la detección C-UAS, dotándolos en estos casos de algoritmos de detección específicos para los objetos voladores.
Su funcionamiento teórico es relativamente sencillo y comparable al del radar o el sonar, con la diferencia de que, en lugar de emitir ondas de radio o acústicas, el LiDAR emite haces de luz que son los que en última instancia rebotan contra los objetivos permitiendo a su recepción que el sistema se haga una composición de lugar. Para ello, un emisor lumínico emite pulsos de luz láser que, una vez alcanzan una superficie y vuelven hacia el emisor, son recogidos por un fotosensor, midiéndose la distancia en función del tiempo transcurrido.
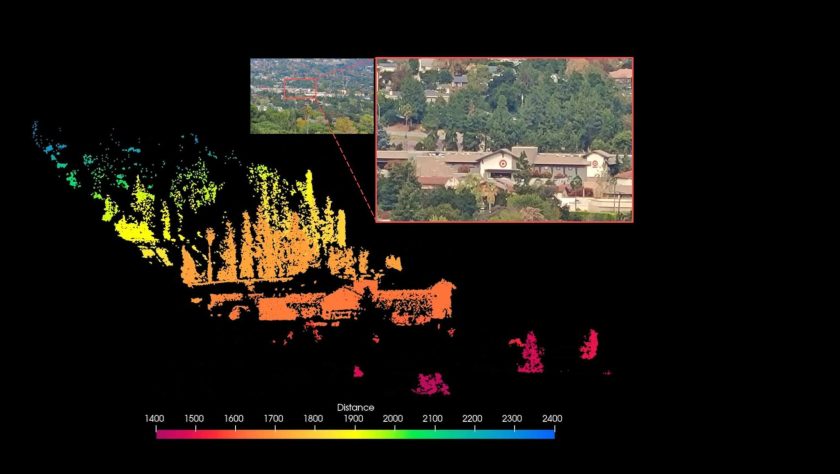
Esta, explicada de forma muy sencilla, se realiza situando sobre un eje tridimensional cada distancia de rebote, de forma que después de rastrear todo su campo de detección, el sistema es capaz de establecer las coordenadas de cada punto y, con ello, modelizar la forma del entorno en base a esa nube de puntos.
La ventaja respecto a los sonares o radares estriba en que los sistemas LiDAR permiten escanear el entorno mucho más rápidamente y con una definición muy superior. Además, permiten también establecer la velocidad de aquellos objetos en movimiento y determinar esta, tanto en términos absolutos como relativos, si el LiDAR está situado sobre una plataforma móvil, como ocurre con los automóviles.
De hecho, no son sistemas en absoluto nuevos, en relación a los drones. Sucede que, hasta no hace mucho, su aplicación era otra. De hecho, se venían utilizando para realizar estudios topográficos y cartográficos gracias a su gran resolución espacial, derivada de una precisión que se mide en centímetros y de una densidad en cuanto a puntos de medición enorme. Todo lo cual permite representar con una enorme fidelidad el terreno modelándolo en tres dimensiones.
Hay que decir, en referencia a este tipo de sistemas, que están logrando importantes saltos en cuanto a capacidad de detección y alcance. Empresas como la estadounidense SiLC Technologies han logrado detectar drones a distancias de más de dos kilómetros. Esto, que es un logro notable, debe ser tomado en perspectiva, pues se ha hecho en condiciones óptimas y contra aparatos estándar. De hecho, la propia empresa rebaja las expectativas en su web, asegurando que su sistema permite alcances de entre 500 y 1.000 metros. Es más, hay estudios que hablan de rangos de detección muchísimo menores, arrojando probabilidades de detección inferiores al 10% a partir de los 45 metros de distancia para drones de pequeño tamaño.
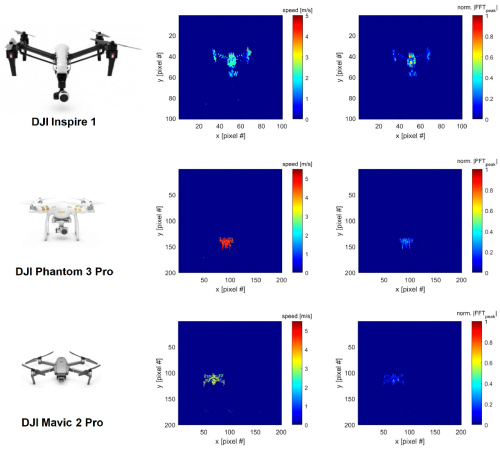
En cualquier caso, lo relevante más que el estado del arte en sí o del hecho de que no todos los tipos de LiDAR son de aplicación a la detección de drones, es que hay razones para pensar que su capacidad, a la hora por ejemplo de discernir el vuelo de un pájaro o el movimiento del follaje en una zona arbolada, de la firma que genera un dron en movimiento es mayor por ejemplo que la de los sistemas electroópticos. De ahí el énfasis puesto en los últimos tiempos en el desarrollo de este tipo de sistemas y, en particular, en la detección de las hélices en movimiento que son, en última instancia, lo más identificable para los sistemas tipo LíDAR.
Radar
Mucho más antiguo en el tiempo, pero con un principio de funcionamiento parecido al del LiDAR, está también el radar. De sobra conocido, no daremos demasiados detalles sobre el mecanismo que hace posible la detección. Sí dejaremos claro que, aunque lo hayamos incluido en el apartado de los sensores activos, existen radares pasivos. De hecho, incluso se están investigando en España sus aplicaciones relativas a la defensa C-UAS por parte de la Universidad de Alcalá, sobre lo que luego hablaremos.
En cuanto a los radares activos, pueden ser de muy distinto tipo: de onda continua, de impulsos doppler, de matriz activa, multiantena (MIMO), de banda ultraancha (UWB), cada uno de los cuales tiene ventajas e inconvenientes en función del objetivo a detectar. En cualquier caso, todos ellos tienen en común que emiten una señal que, una vez reflejada por el objeto a localizar, permite medir la distancia y velocidad respecto a este, determinando tanto su posición, como su rumbo. En el caso de los radares 3D, también la altura.
Después de décadas de desarrollo y utilización, son muchos los estados que cuentan con un amplio bagaje en todo lo relacionado con el diseño y construcción de radares. España, de hecho, estaría situada en el grupo de cabeza, gracias por ejemplo a los desarrollos de Indra, responsable entre otros de la conocida familia Lanza. Ahora bien, aunque los principios físicos sean similares, la detección de aeronaves tripuladas y la de pequeños drones tiene muy poco en común.
De ahí que en los últimos tiempos hayan aparecido compañías especializadas en el diseño de radares C-UAS, capaces de detectar objetos mucho más pequeños y con materiales muy distintos. En este sentido, y también en España, tenemos por ejemplo la madrileña Advanced Radar Technologies (ART), con un amplio y consolidado catálogo de soluciones. A nivel internacional, aunque el número de empresas es enorme, destacan algunas como la neerlandesa Robin Radar, que produce algunos de los sistemas con mayor difusión.
Estos, además de en sistemas de defensa C-UAS militares, son empleados por ejemplo en aeropuertos civiles, para los cuales la irrupción de drones se ha convertido en un problema serio. De hecho, vienen a añadir una dificultad adicional a la detección de otras amenazas, como las que les planteaban los pájaros. Es más, empresas como la citada Robin llevaban años trabajando en la detección de estos últimos, con lo que el paso dado hacia la defensa C-UAS es totalmente lógico.
Pasando a los retos que ofrece el uso de radar para la defensa C-UAS, hay que tener en cuenta que los drones, en muchos casos, no exceden los 20 o 30 centímetros de envergadura. Una medida que es, además, poco útil. Al fin y al cabo, los brazos de un cuadricóptero o sus hélices ofrecen una escasa refracción, tanto por grosor como por los materiales empleados. Este último, el tema de los materiales, no es baladí. En los últimos tiempos hemos visto drones de papel, de bambú, de plástico inyectado, de fibra… Materiales todos ellos muy diferentes a los que podemos encontrar en un avión sea militar o civil, por más que el uso de composites se haya extendido.

Al respecto, y como explica Octavio González García, la detección de drones de pequeño tamaño implica poder «definir un proceso en tiempo real para distribuirlo entre diferentes máquinas, y que sea capaz de llevar a cabo la generación de señal, su recepción y el proceso y tratamiento de la señal transmitida/recibida». Todo ello: 1) en tiempo real, considerando la RCS (Radar Cross Section o Sección radar equivalente) que se necesite detectar y el entorno de trabajo; 2) asegurando el adecuado tratamiento de los datos para que no haya pérdidas; 3) logrando extraer toda la información útil de los datos recolectados lo que, a su vez podría implicar; 4) el uso de inteligencia artificial, dado el ingente volumen de información recolectada. No es necesario explicar que si esto es necesario para detectar con garantías un drone micro o mini, el desafío será tanto mayor cuando hablemos de grupos de drones o, peor aún, de verdaderos enjambres.
Más allá de las dificultades técnicas de la localización de drones de pequeño tamaño, hay que tener en cuenta otras consideraciones. Por ejemplo, que los radares se han convertido en uno de los objetivos principales para cualquier ejército con ciertas capacidades de detectarlos. En la guerra de Ucrania hemos visto cómo en repetidas ocasiones los M142 HIMARS golpeaban los radares rusos. También como los drones kamikaze Lancet hacían lo propio con los antiaéreos ucranianos, en muchos casos tras detectar las emisiones de sus radares. Hablamos, en este caso, de equipos de grandes dimensiones y gran potencia de emisión, claro está.
(Continúa…) Estimado lector, este artículo es exclusivo para usuarios de pago. Si desea acceder al texto completo, puede suscribirse a Revista Ejércitos aprovechando nuestra oferta para nuevos suscriptores a través del siguiente enlace.
IMPORTANTE: Las opiniones recogidas en los artículos pertenecen única y exclusivamente al autor y no son en modo alguna representativas de la posición de Ejércitos – Revista digital sobre Defensa, Armamento y Fuerzas Armadas, un medio que está abierto a todo tipo de sensibilidades y criterios, que nace para fomentar el debate sobre Defensa y que siempre está dispuesto a dar cabida a nuevos puntos de vista siempre que estén bien argumentados y cumplan con nuestros requisitos editoriales.
Be the first to comment