
Las fuerzas submarinas de China y Rusia están demostrando su destreza operando cada vez más lejos de sus bases, en algunos casos, cerca de costas de los países de la OTAN. Esta fuerte expansión lleva a requerir más sensores acústicos y sistemas para monitorizar esta amenaza. En la guerra actual, el ritmo de avance tecnológico hace difícil desarrollar sistemas como en décadas pasadas. Las amenazas se deben atajar rápidamente, con tecnología poco madura.
El presente de la guerra antisubmarina es la triada formada por sistemas autónomos, el Big Data y la Inteligencia Artificial (IA). El análisis acústico de miles de sistemas, impulsado por la Inteligencia Artificial, nos llevará a océanos casi transparentes, algo que negará la mayor cualidad del submarino, su invisibilidad[1].
Las velocidades de los sistemas que estamos viendo nos hacen pensar que España debería avanzar en estos sistemas, algo que empresas semipúblicas como SAES están tratando de lograr. En este artículo veremos los sistemas anteriores a la Guerra Fría, la tendencia actual y los sistemas que podríamos disponer en España.

Introducción a los sensores acústicos
La guerra está evolucionando, desde la Primera Guerra Mundial y después la Segunda, la evolución de las armas nos ha llevado a sistemas cada vez más autónomos; un ejemplo, son los drones aéreos en los últimos conflictos.
La evolución en la Mar ha sido pareja, barcos con menos dotaciones, más sensores y mejor armados. En las profundidades marinas, el desarrollo ha ido más despacio, es lo que tiene moverse en un ambiente hostil como el agua.
Un nuevo tipo de guerra submarina busca crear sistemas distribuidos compuestos por vehículos no tripulados, sensores acústicos y nodos de comunicaciones. Estas redes submarinas estarían destinadas a proporcionar una mayor capacidad de mando y control C2 (del inglés Command and Control) y una vigilancia submarina persistente.
El futuro de la guerra antisubmarina para países que no pueden permitirse invertir en plataformas antisubmarinas o aviones de patrulla marítima podría ser una flotilla de plataformas no tripuladas que pueden crear barreras acústicas pasivas en cuellos de botella con sonares remolcados a través de las aguas territoriales de un país[2].
Hace poco más de un mes, los noruegos que cuentan con una red de este tipo se encontraron con la desagradable sorpresa de que alguien se había llevado unos cuantos metros de su cable[3].
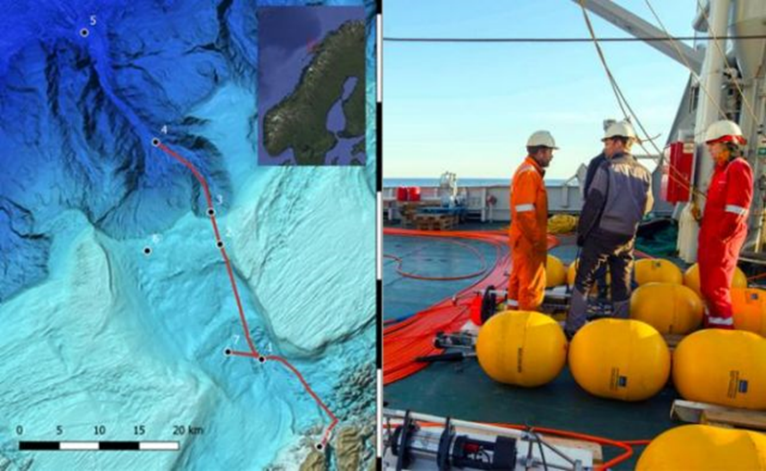
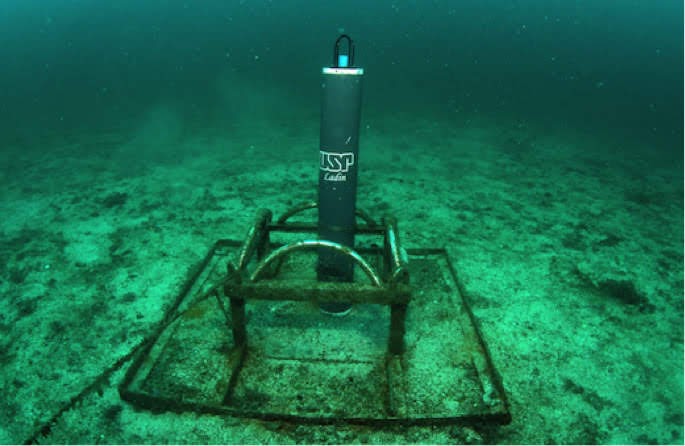
La red noruega de sensores acústicos submarinos llamada LoVe (acrónimo de Lofoten-Vesterolen) es un cable de 66 kilómetros tendido en la confluencia de los mares del Norte y de Noruega con el Océano Atlántico a una profundidad de hasta dos kilómetros y medio. Todo el sistema está equipado con una red de sensores, sonares, micrófonos de alta precisión y cámaras de vigilancia.
Una parte de este sistema, algunas fuentes lo cifran en 10 toneladas de cable, se perdió en la primavera de este año, aunque oficialmente no se reconoció hasta que hace unos meses especialistas noruegos en guerra antisubmarina notificaron problemas con su sistema LoVe.
LoVe consta de cinco secciones de cable y dos nodos autónomos. Es un proyecto financiado por el gobierno de Noruega, la multinacional Equinor y otros inversores privados, incluidas algunas empresas contratistas de la OTAN. Nexans y Siemens Subsea son los proveedores de los cables de fibra óptica, Metas es el fabricante del sistema de monitoreo subacuático animal, un nodo científico con múltiples sensores que permite observar la vida marina y la migración de peces en tiempo real.

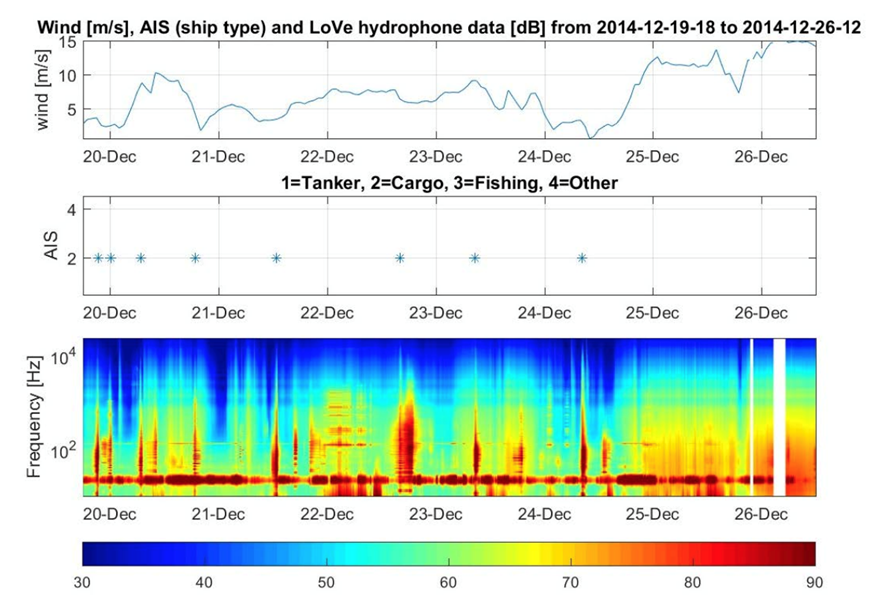
Noruega monitoriza los cambios oceanográficos, el nivel de emisiones de gases y cómo se mezclan las aguas del mar de Noruega y el océano Atlántico. Además, la red de sensores registra la información acústica que genera todo el movimiento de barcos y submarinos que pasan por sus proximidades.
Esta información la comparan con los datos que reciben del Sistema de identificación automática AIS (del inglés Automatic Identification System), permitiendo distinguir en cualquier momento si el ruido que se escucha coincide con una plataforma de superficie o submarina. Vemos a continuación el monitoreo en una franja de una semana de diciembre de 2019.
La información recibida primero pasa por el filtro del Instituto de Investigación de Defensa de Noruega FFI o Forsvarets forskningsinstitutt (en inglés Norwegian Defence Research Establishment), que recopila información militar confidencial, y solo entonces, después de la criba, pasa a manos de los científicos del Instituto de Investigación Marina (en inglés Institute of Marine Research).
Las bases militares noruegas que se encargan de recopilar toda la información se encuentran cerca de Narvik. Durante muchos años, la Marina Noruega ocultó el hecho de que la vigilancia de los submarinos era una prioridad del proyecto, y siempre atribuyó a objetivos puramente medioambientales la instalación de la red LoVe.
Otros sistemas de sensores acústicos
En un artículo del Navy History del US Naval Institute en 2021, el capitán de navío Brian Taddiken y el teniente navío Kirsten Krock de la Marina de Estados Unidos (en inglés US Navy) nos hablaban de los orígenes del sistema de vigilancia acústica SOSUS (en inglés Sound Surveillance System)[4].
Una reunión de la Marina de Estados Unidos (US Navy) con técnicos de la Bell Telephone Laboratories y un representante del Instituto de Tecnología de Massachusetts dio como resultado el Proyecto Hartwell, un programa de investigación para el desarrollo de nuevos sensores acústicos antisubmarinos. Los experimentos llevados a cabo durante la primavera de 1950 revelaron que los submarinos irradiaban sonidos en el espectro de baja frecuencia que se propagaban a grandes distancias[5].
Los resultados llevaron a la US Navy a la creación de un nuevo programa, el Proyecto Jezabel[6]. En diciembre de 1950, la Oficina de Investigación Naval otorgó un contrato a la Western Electric Company (WECO) para continuar la investigación en la detección e identificación de los sonidos de baja frecuencia irradiados por los submarinos y continuar con el trabajo de desarrollo destinado a la fabricación e instalación de equipos para detectar y clasificación de submarinos a grandes distancias.
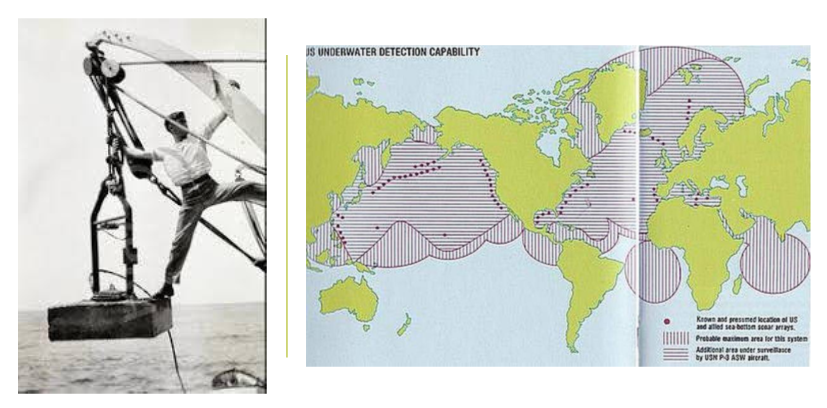
Bajo la supervisión del alférez de navío Joseph P. Kelly, el Proyecto Jezabel recibió autorización para fondear una matriz de seis elementos en la isla Eleuthera en las Bahamas lo que permitió el desarrollo posterior de SOSUS, un sistema de detección de submarinos a larga distancia. Más tarde, Joe Kelly llegaría ser conocido como “el padre del SOSUS”.
Las pruebas exitosas con un submarino dieron como resultado la instalación de nueve hidrófonos a lo largo de la costa del Atlántico noroccidental. La combinación de la ubicación de los hidrófonos y su sensibilidad permitió al sistema detectar señales acústicas de menos de un vatio de potencia a varios cientos de kilómetros. Las estaciones de procesamiento fueron designadas con el nombre genérico de Naval Facility (NAVFAC).
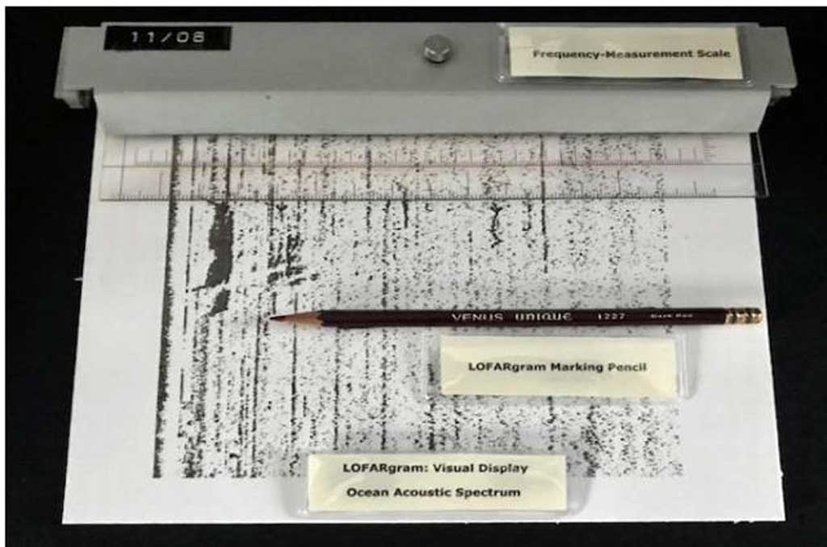
Para operar el equipo en estas estaciones, la US Navy desarrolló un curso especifico, por supuesto clasificado. Cuando los primeros operadores de sonar llegaron a sus estaciones, no tenían experiencia, ni material de referencia, ni biblioteca de publicaciones, ni expertos a quienes recurrir, ni gráficos de baja frecuencia anteriores para comparar. Uno de los analistas originales dijo: “No teníamos nada, no sabíamos nada, no sabíamos qué formaban las líneas, el espaciado, etc., cómo llegaban al papel, etc.”.
Los analistas de la US Navy se dedicaban a monitorizar el ruido y trataban de detectar el paso de los submarinos rusos. La red SOSUS se estableció entre Islandia y Reino Unido, permitiendo obtener una enorme librería de firmas acústicas diferentes. Cada submarino, independientemente del país al que pertenece, cuenta con una firma acústica característica según el modelo, forma hidrodinámica, tipo de propulsión, hélices, sistema de refrigeración, etc., emite un sonido característico, único e intransferible, no hay dos submarinos iguales.

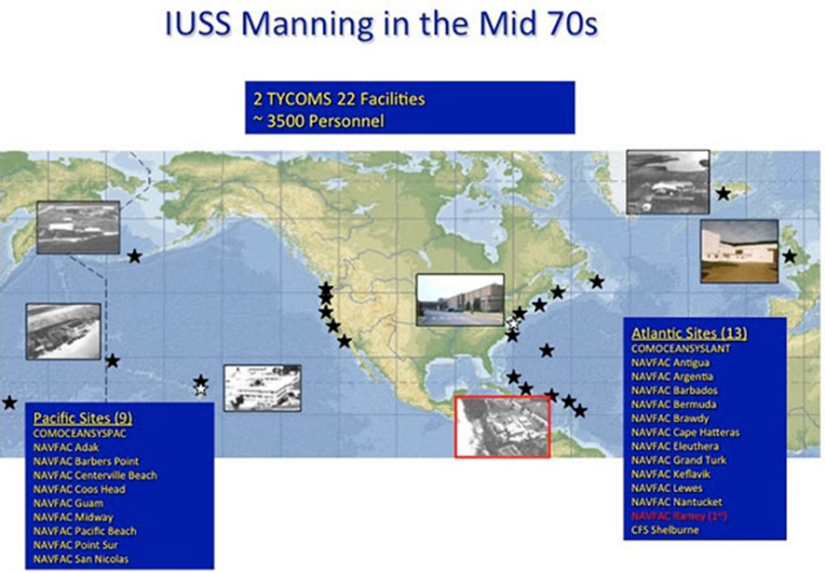
La década de 1960 fue testigo del desarrollo y crecimiento de la vigilancia submarina. Se abrieron nuevos NAVFAC a medida que el sistema obtuvo éxito tras éxito. Para administrar los NAVFAC ubicados en todo el mundo se requerían dos mandos separados en el Atlántico y en el Pacífico.
Rápidamente, el programa se extendió para cubrir toda la costa este estadounidense, desde el Caribe hasta Nueva Escocia. Dos años más tarde, la red de escucha se extendía por la costa de California, y más tarde, las islas Hawái[7].
En la década de 1980, las mejoras en la tecnología de comunicaciones permitieron que los datos de cada matriz, una vez procesados en las instalaciones navales individuales NAVFAC, se enviaran a un centro de procesamiento central denominado NOPF (del inglés Naval Ocean Processing Facility) para la triangulación y el procesamiento centralizado de información de múltiples matrices fijas y móviles.
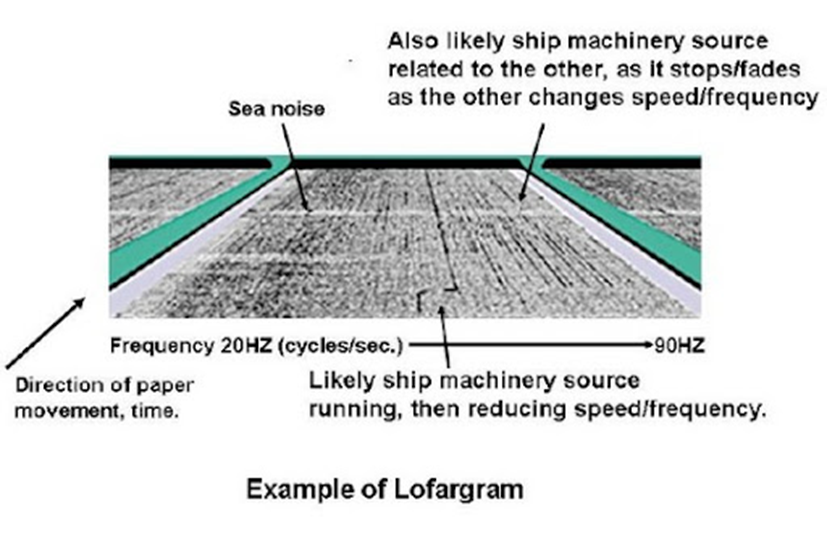
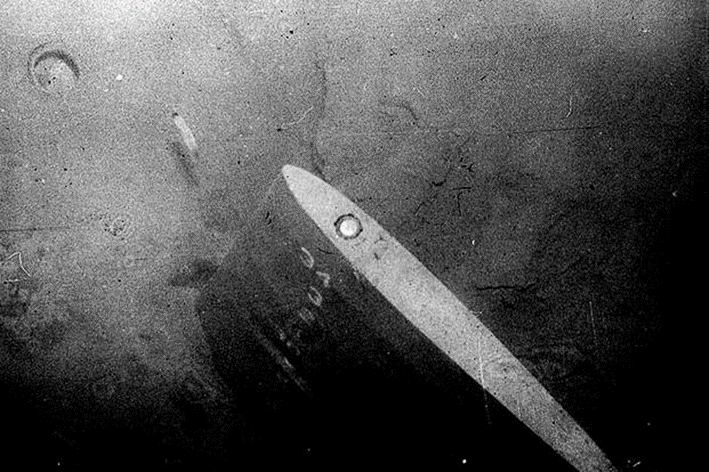
Aunque fue diseñado como un sistema de vigilancia de alerta temprana, un trágico accidente puso de relieve otra aplicación para la que SOSUS se volvió útil. En 1963, los analistas de SOSUS detectaron el hundimiento del submarino de ataque de propulsión nuclear USS Thresher (SSN-593). El análisis de los lofargramas señaló la ubicación exacta del incidente y sus restos. Más adelante en la década de los ochenta, SOSUS desempeñó papeles similares en el accidente del USS Scorpion (SSN-589) y el K-129 soviético.
Esta red se fue extendiendo, aprovechando bases y estaciones navales británicas y norteamericanas por todo el Atlántico, no solo en la red SOSUS, también en otro tipo de redes como la CTBTO, incluso en las proximidades de Sudamérica como pudimos ver con el accidente del ARA San Juan; la primera noticia de la implosión del submarino fue gracias a unos sensores próximos a la isla de Ascensión.
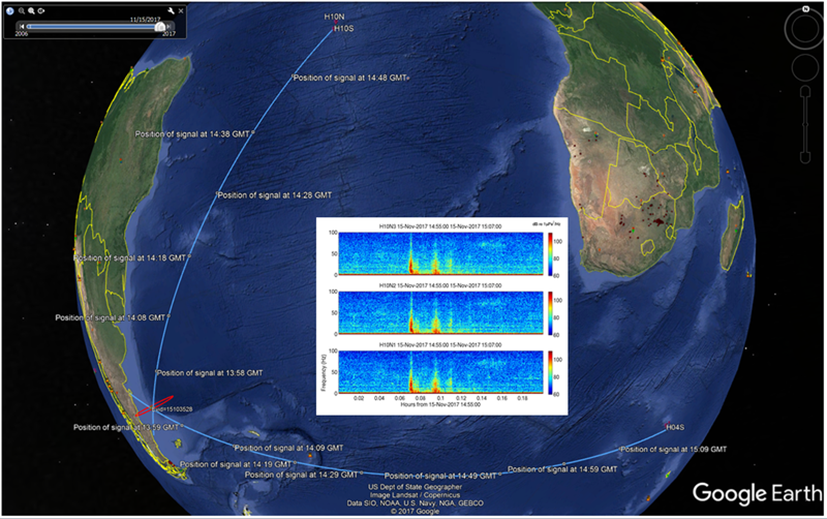
Las estaciones de hidrófonos HA10 (isla Ascensión) y HA04 (Crozet) detectaron una señal de un evento impulsivo submarino que ocurrió a las 13:51 GMT del 15 de noviembre. La ubicación del evento es la siguiente: Latitud: 46,12 grados Sur; Longitud: -59.69 grados Oeste que se encuentra en las cercanías de la última ubicación conocida del ARA San Juan.
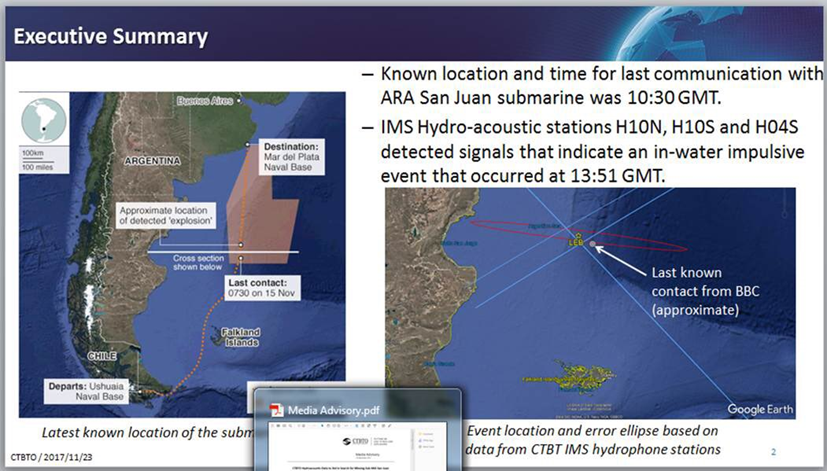
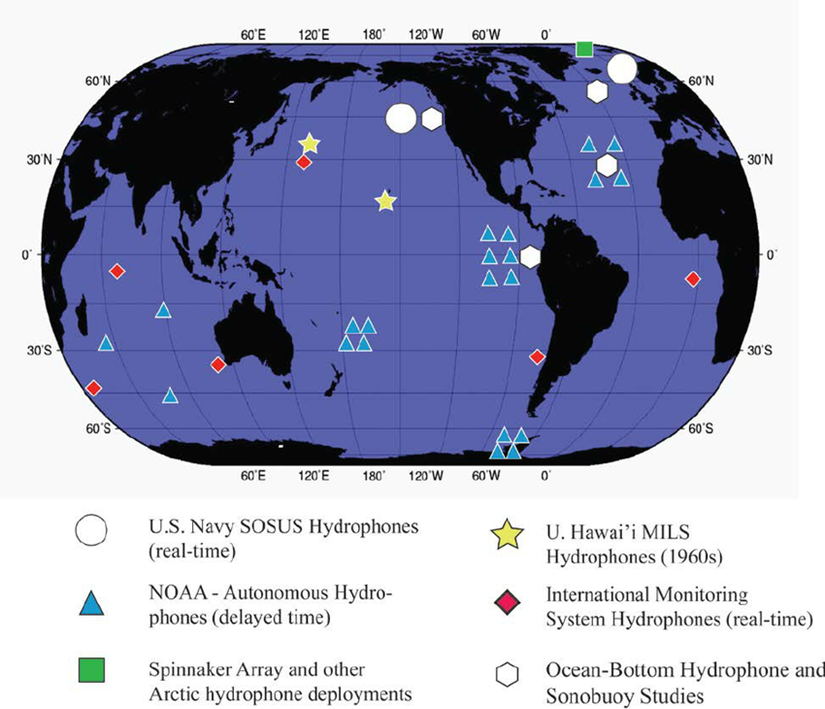
Las estaciones de hidrófonos son parte del Sistema de Monitoreo Internacional (IMS) de la Organización del Tratado de Prohibición Completa de los Ensayos Nucleares CTBTO (en inglés Comprehensive Nuclear-Test-Ban Treaty Organization) que monitorea el mundo continuamente en busca de signos de explosiones nucleares[8]. El sonido subacuático de baja frecuencia, que puede producirse mediante una prueba nuclear, se propaga de manera muy eficiente a través del agua.
En consecuencia, estos sonidos submarinos se pueden detectar a grandes distancias, incluso miles de kilómetros, desde su fuente. Es por eso que el CTBTO requiere solo once estaciones de hidrófonos para monitorear de manera efectiva los océanos del mundo. También hay estaciones de la NOAA y de diferentes organismos, pero solo SOSUS y el CTBTO monitorizan en tiempo real. Aquí faltarían los de otros países, y los proyectos secretos del que poco o nada podemos decir.
En 1972, el concepto de remolcar una larga línea de hidrófonos desde un barco de superficie estaba demostrando ser un método muy eficaz para detectar submarinos a largas distancias. La Armada reconoció su valor como un aumento móvil de las matrices fijas SOSUS y como un medio para extender la cobertura del sonar de los barcos combatientes. Los barcos de vigilancia oceánica (T-AGOS) fueron diseñados específicamente para remolcar arreglos de hidrófonos de línea larga a velocidades lentas, en áreas donde los arreglos fijos carecían de cobertura acústica.
Se mejoró la tecnología de cables y el procesamiento de señales y se realizaron actualizaciones a las instalaciones originales[9]. La tecnología de cables hizo posible ubicar las matrices más lejos de la costa hacia las cuencas oceánicas. Las nuevas capacidades de procesamiento de señales permitieron innovaciones como la matriz dividida en la que una matriz se dividió en segmentos, cada uno procesado por separado y luego recombinado electrónicamente para formar haces más estrechos para una mejor orientación y arreglos cruzados entre las matrices.
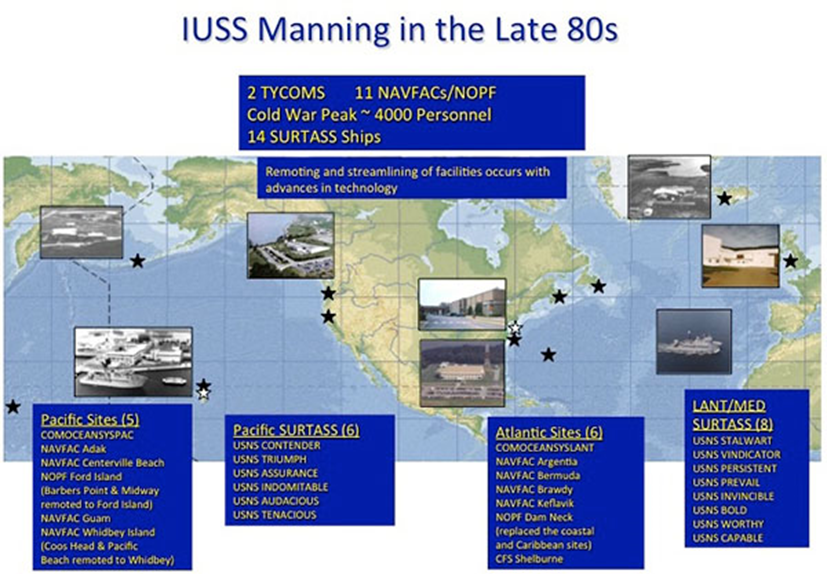
En la década de 1980, SOSUS se había convertido en una comunidad de miles de marineros y múltiples sistemas fijos y móviles; SOSUS y el sistema de sensores acústicos de arrastre remolcado de vigilancia SURTASS (del inglés Surveillance Towed Array Sensor System) se consolidaron bajo un nuevo nombre, el Sistema Integrado de Vigilancia Submarina IUSS (del inglés Integrated Undersea Surveillance System). El sistema alcanzó su punto álgido al final de a Guerra Fría con 11 estaciones NAVFAC/NOPF, 14 barcos SURTASS, dos mandos operativos completos, Atlántico y Pacífico, y un mando embarcad12o con 4.000 efectivos a finales de la década de 1980[10].
El primer barco SURTASS, el USNS Stalwart (T-AGOS-1), se puso en servicio en 1984, seguido del Contender (T-AGOS-2) y el Vindicator (T-AGOS-3). Durante los siguientes siete años, se pusieron en servicio 18 barcos SURTASS, lo que requirió la necesidad de una instalación de reparación de barcos y conjuntos; por lo tanto, el Centro de Apoyo a las Operaciones de IUSS se instaló en Little Creek, Virginia.
A medida que la tecnología avanzaba rápidamente, las instalaciones se consolidaron, mientras que la cobertura se mantuvo. La capacidad de transmitir datos acústicos a una instalación centralizada redujo los requisitos de personal y provocó el cierre de instalaciones más pequeñas y antiguas.
A finales de los ochenta con la Guerra Fría todavía en su punto álgido, la flota SURTASS dio un paso adelante con la puesta en servicio del USNS Victorious (T-AGOS-19), el primer buque SURTASS de doble casco o catamarán clase SWATH (del inglés Small Waterplane Area Twin Hull), comentados profusamente en un artículo de Christian D. Villanueva López.
En noviembre de 1986 se adjudicó el primer contrato para el primero, y en octubre de 1988 se contrataron los otros tres que más tarde serían reconfigurados para llevar el array activo de muy baja frecuencia LFA.
El casco le dio al buque un alto grado de estabilidad en alta mar mientras se realizan operaciones a baja velocidad, máxima 10 nudos y 3 si están remolcando. Todo el procesamiento de la señal se transmite a una instalación en tierra para su análisis, aunque a bordo también se trabajaba en ella, el procesado grande se hacía en tierra, algo que incidiremos cuando hablemos de la Inteligencia Artificial en el procesado de señales acústicas.

En 1991, cuando la Guerra Fría llegó a su fin con la disolución de la Unión Soviética, la misión IUSS fue desclasificada después de 41 años de secreto. Los cambios en las operaciones soviéticas, pocos submarinos nucleares hostiles en el mar y el final de la Guerra Fría significaron que disminuyó la necesidad de mantener SOSUS a plena capacidad, resultando un sistema mucho más pequeño.
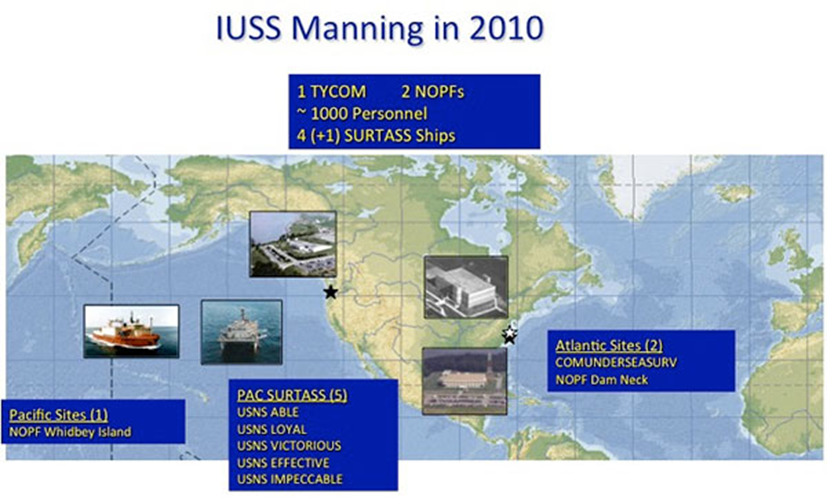
Además, la mejora en comunicaciones y el procesamiento de señal en tierra permitieron la centralización de las estaciones en tierra en unas pocas instalaciones centrales de procesamiento. Para 2010, solo quedaban dos NOPF, cinco barcos SURTASS (todos en el Océano Pacífico), un solo comando del sistema y alrededor de 1.000 efectivos.
Pero llegamos en esa fecha, al fuerte desarrollo de China y sus submarinos convencionales, tema que tratamos en un artículo para esta revista. Al darse cuenta de que los submarinos se estaban volviendo cada vez más silenciosos y los rangos de detección disminuían, se buscó montarles un sonar activo. Aprobaron la investigación de un nuevo sistema llamado Sistema Activo de Baja Frecuencia LFA (del inglés Low Frequency Active).
El sonar pasivo se basa en que la fuente sea lo suficientemente fuerte como para ser detectada por un receptor, el sistema activo transmite su propia señal; la transmisión viaja a la superficie de un objeto, rebota y regresa al receptor. El LFA utiliza una frecuencia mucho más baja que los sonares activos estándar, por lo que recorre mayores distancias.
Con la emergente amenaza china en el Pacífico y su gran área de búsqueda, todos los buques SURTASS fueron transferidos a la flota del Pacífico. El USNS Impeccable (T-AGOS-23) y el UNSN Able (T-AGOS-20) fueron transferidos del Atlántico al Pacífico. A los cuatro buques iniciales de la clase Victorious entregados entre septiembre de 1991 y julio de 1993, se les sumó un quinto barco en 2001 el USNS Impeccable (T-AGOS 23). Este barco adopta la misma forma de casco SWATH pero es más largo y está configurado con una planta de propulsión más potente.
El USNS Impeccable fue diseñado específicamente para implementar un sistema de arrastre activo de baja frecuencia (LFA). Los barcos anteriores han recibido posteriormente una versión compacta LFA (CLFA). En 2015, los cuatro buques de la clase Victorious fueron equipados con el CLFA (y el Impecable con el LFA). Cada buque SURTASS está equipado con un sonar remolcado TL-29A de dos líneas, una variación de la matriz submarina TB-29. El primer TL-29A de dos líneas, fabricado por Lockheed Martin, se instaló en 2006.

Las embarcaciones SURTASS son plataformas únicas ya que los operadores se entrenan en el NOPF de Whidbey Island y solo tienen acceso al equipo de sonar mientras están a bordo, por eso se invirtió en un simulador de alta fidelidad instalado en Whidbey Island en 2012. A lo largo de los años, las actualizaciones han incluido dos simuladores más con capacidad de simulación mejorada, tres en total, y varias estaciones de monitoreo y control.
(Continúa…) Estimado lector, este artículo es exclusivo para usuarios de pago. Si desea acceder al texto completo, puede suscribirse a Revista Ejércitos aprovechando nuestra oferta para nuevos suscriptores a través del siguiente enlace.
IMPORTANTE: Las opiniones recogidas en los artículos pertenecen única y exclusivamente al autor y no son en modo alguna representativas de la posición de Ejércitos – Revista digital sobre Defensa, Armamento y Fuerzas Armadas, un medio que está abierto a todo tipo de sensibilidades y criterios, que nace para fomentar el debate sobre Defensa y que siempre está dispuesto a dar cabida a nuevos puntos de vista siempre que estén bien argumentados y cumplan con nuestros requisitos editoriales.
Be the first to comment