

En los próximos años una nueva clase de buques de vigilancia oceánica se unirá a las filas de la US Navy. Conocido por el momento como T-AGOS(X), este proyecto de extraña silueta será el más moderno de una larga saga de embarcaciones dedicadas a la obtención de información acústica procedente del medio submarino, gracias a sus complejos sonares pasivos y activos. No será el único; tanto Japón como China llevan tiempo trabajando en proyectos similares ante el convencimiento de que la guerra submarina seguirá cobrando relevancia en los años venideros, de ahí el incremento en el número de aviones MPA y de medios ASW en general. Medios que necesitan de este tipo de buques para sacar el máximo partido a sus equipos, como veremos.
Aunque desconocidos para el gran público, los buques como el T-AGOS cuya imagen encabeza este artículo, no son en realidad ninguna novedad. Desde hace casi cuatro décadas se vienen utilizando, especialmente en el caso de los Estados Unidos como medio de escucha submarina. Hoy en día son una más de las herramientas al servicio del Sistema Integrado de Vigilancia Submarina (IUSS o Integrated Undersea Surveillance System) estadounidense, la institución que gestiona todos los recursos obtenidos mediante técnicas ACINT (Acoustic Intelligence o Inteligencia Acústica), fundamental a la hora de completar las bases de datos que permiten que los medios ASW (Anti-Submarine Warfare o Guerra Antisubmarina) cumplan su función. La misión de este organismo es clave, pues consiste en:
- Apoyar al mando de la guerra antisubmarina y a las unidades en servicio detectando, clasificando y proporcionando información oportuna sobre submarinos y otros contactos de interés;
- Dirigir las instalaciones navales de procesamiento oceánico (NOPF o Naval Ocean Processing Facilities), incluyendo los buques asociados al sistema de sensores SURTASS o la red SOSUS y;
- Reunir información acústica, oceanográfica e hidrográfica a largo plazo.
Sería, salvando las distancias (pues los medios estadounidenses están a otro nivel cualitativo y cuantitativo), algo parecido a lo que en España hace el Sistema Integrado de Proceso de Señales, dependiente del CIFAS (que depende a su vez del EMAD) y que integra todas las señales recibidas, las procesa y genera las bibliotecas que luego aprovechan los buques y que se suman a las NATO Emitter Databases.
En el caso de los EE. UU. el primer buque especializado en la misión de vigilancia oceánica fue el T-AGOS-1 (Tactical Auxiliary General Ocean Surveillance) botado en julio de 1983 y bautizado como USNS Stalwart. Su entrada en servicio no fue casual, pues coincidió con dos fenómenos que estaban cambiando la guerra ASW por completo:
- La entrada en servicio de una nueva hornada de submarinos soviéticos de tercera generación, como los SS Kilo (Proyecto 887 Paltus), SSN Alfa (Proyecto 705 Lyra) y Akula (Proyecto 971 Shchuka-B) o los monstruosos SSBN Typhoon (Proyecto 941 Akula). Todos ellos suponían un verdadero salto generacional y gracias a los avances en cuanto a propulsión y aislamiento, se acercaban en sigilo a los submarinos de la US Navy mucho más que las generaciones anteriores.
- La aparición de nuevos sistemas de escucha que se beneficiaban de la miniaturización de componentes derivada de la revolución tecnológica en curso, auspiciada en gran parte por la Second Offset Strategy, permitía alumbrar sensores, como los nuevos sonares remolcados AN/UQQ-2 SURTASS (Surveillance Towed Array Sensor System). Estos, con una sensibilidad sin precedentes, comenzaron su desarrollo en 1973, estando operativos a principios de la década siguiente.
Con la rama submarina de la VMF creciendo en calidad y atreviéndose cada vez más allá de los bastiones para rondar los Estados Unidos continentales incluso en la costa Oeste, redes como SOSUS (Sound Surveillance System), una serie de puntos de escucha situados a lo largo de la línea GIUK (Groenlandia-Islandia-Reino Unido) y en otros puntos del Atlántico y del Pacífico resultaban insuficientes. Sus capacidades eran innegables, pues permitían detectar las emisiones sonoras de los submarinos enemigos en su tránsito hacia las latitudes medias, pero estaba claro que hacía falta algo más si de verdad se quería sacar todo el partido a esta tecnología.
Ese “algo más” era la capacidad de obtención de inteligencia fiable y precisa; información sobre la firma acústica de los submarinos a detectar que permitiese completar las bibliotecas de datos de los sistemas de procesamiento, haciendo que las señales captadas fueran correctamente interpretadas en lo sucesivo. Además, la información obtenida no sólo revertiría en la mejora de la red SOSUS, sino en todos y cada uno de los buques en servicio y dotados de sonar, sus helicópteros ASW embarcados y los aviones MPA, pues sus sensores podrían beneficiarse más tarde de esta fuente de datos.
Ahora bien, la forma de traducir estas intenciones en capacidades concretas era compleja. Se necesitaban nuevos equipos y nuevos tipos de buques aptos para operarlos, además de formar al personal y desarrollar una doctrina que hiciera posible sacar el máximo partido de ellos. Se necesitaba, por encima de todo, acercarse a las fuentes de emisión, lo que significaba acercar los equipos de detección lo más cerca posible de las costas enemigas, a las rutas empleadas por el enemigo y a los puntos de paso obligados. Para ello, nada mejor que embarcar equipos a bordo de buques capaces de realizar largas patrullas en tiempos de paz y, a ser posible, camuflados en la medida de lo posible como buques de investigación oceanográfica, del mismo modo que se utilizaban pesqueros como buques espía, por ejemplo.

Los inicios de la vigilancia oceánica
Los EE. UU., para principios de los 80, acumulaban décadas de experiencia en lo relativo a la escucha submarina. La motivación tras el final de la Segunda Guerra Mundial era evidente, pues se sabía que los soviéticos se habían hecho con una cantidad nada desdeñable de tecnología nazi, incluyendo cuatro submarinos Tipo XXI completos que sentarían la base de futuros modelos como los Whiskey, Zulu o Romeo, todos ellos con capacidad oceánica.
Por si esto fuera poco, para mediados de los 50 los soviéticos ya habían completado el desarrollo del submarino Zulu V (Proyecto AV 611), que gracias al misil R-11FM, de apenas 150 kilómetros de alcance, pero operativo desde 1959 y capaz de portar una cabeza nuclear, se convertiría en el primer SSBN de la historia, por más que sus capacidades fuesen precarias.
Los norteamericanos no se habían quedado de brazos cruzados. En 1946 la Academia Nacional de Ciencias había creado un grupo de investigación (Proyecto Hartwell) centrado en la guerra submarina que ya entonces recomendó desarrollar sistemas de escucha fijos en el fondo marino y basados en hidrófonos capaces de utilizar el canal de sonido profundo (SOFAR o Sound Fixing and Ranging channel)
En los años siguientes se llevaron a cabo numerosos experimentos e iniciativas en las que tomaron parte compañías como los Laboratorios Bell, AT&T, Western Electric o instituciones como el MIT. Esto permitió desarrollar un sistema de escucha y grabación de baja frecuencia (LOFAR o Low Frecuency Analyzer and Recorder), conocido en clave como Proyecto Jezebel.
En paralelo, en 1951, la Universidad de Columbia y la Oficina de Investigación Naval (ONR u Office of Naval Research) de la US Navy crearon el laboratorio Hudson para trabajar también en la detección submarina, utilizando entre otros medios el buque USNS Josiah Willard Gibbs (ex-USS San Carlos) (T-AGOR-1) como laboratorio flotante, en lo que se conoció como Proyecto Michael.
Las primeras pruebas se llevarían a cabo en Bahamas en 1951, pero no alcanzaría su cénit hasta los años, cuando las instalaciones fijas individuales, que necesitaban de operarios y carísimos sistemas de análisis in situ, pasaron a ser controladas desde la distancia, ahorrando costes y conformando un sistema unificado. Además, fue por esos años cuando una nueva tecnología de la que hemos hablado al principio vino a completar el cuadro, suponiendo de paso un salto abismal: el desarrollo del SURTASS.

Surveillance Towed Array Sensor System (SURTASS)
El SURTASS, explicado de forma sencilla, fue en su concepción original un sistema de escucha que empleaba un cable remolcado plagado de sensores acústicos (hidrófonos). Su ventaja respecto a soluciones más comunes, como los sonares tradicionales de casco o instalaciones fijas como las que pueblan la red SOSUS, era que combinaban una alta sensibilidad, con la posibilidad de cubrir enormes extensiones de océano, aún a las reducidas velocidades a las que pueden evolucionar las embarcaciones desde las que se utiliza, dada la necesidad de generar el mínimo ruido posible durante la navegación.
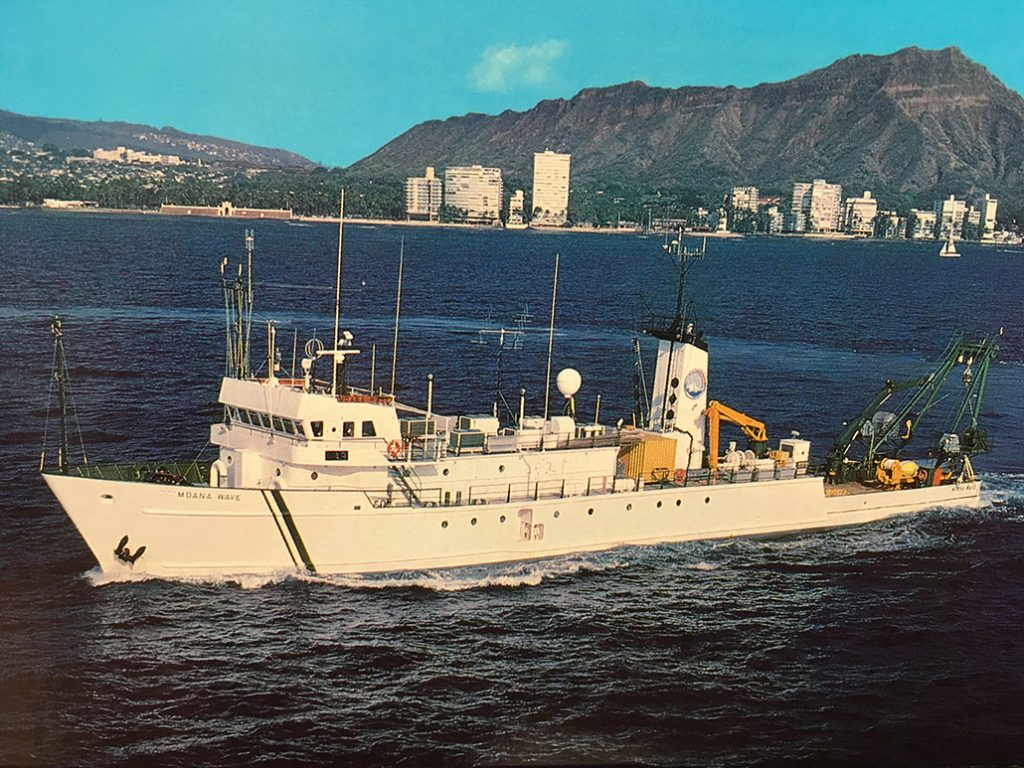
Iniciado su desarrollo en 1973, entraría en servicio en 1984 a bordo del primer buque de la nueva clase Stalwart (USNS Stalwart) (T-AGOS-1), tras haber sido probado durante varios años a bordo del buque de investigación oceanográfica de la Universidad de Hawaii Moana Wave (renombrado en 2010 como Alpha Crucis y vendido en 2008 a la Universidad de São Paulo).
Elegir un buque civil no fue una casualidad. Desde sus inicios, el sistema ha estado embarcado en buques civiles, incluyéndose entre estos los T-AGOS, que siempre se han encuadrado como si de buques oceanográficos se tratase, dentro del Military Sealift Command. Esto último permite, pese a que el MSC es un organismo dependiente de la US Navy, alistar tripulaciones civiles y operar sin armamento a bordo, algo que puede ser muy útil en según qué condiciones (Zona Gris) aunque parezca un sinsentido.
La suite SURTASS, que ha ido mejorando con el paso de los años e incluyendo sistemas complementarios, además de ofrecer información táctica sobre el trasiego de unidades enemigas en las zonas de patrulla, tiene un segundo uso fundamental; permite completar las bibliotecas de datos con información muy valiosa que más tarde se incorporar a los sistemas de procesado de señales del resto de la flota o de la propia red SOSUS.
Cada vez que un nuevo submarino enemigo (o no) aparece en escena o que un submarino ya conocido es detectado, pero presenta alguna curiosidad en sus emisiones (debida por ejemplo a una modificación mecánica o de otro tipo), las nuevas señales captadas se envían a un centro de procesamiento de datos en donde son clasificadas, engrosando el catálogo del IUSS.

Precisamente esta es una de las curiosidades del sistema SURTASS, y es que a diferencia de lo que ocurre en los submarinos con sus sonares de casco y remolcados, los datos se comparten en tiempo real vía satélite (en los submarinos sería imposible, pues precisamente navegar bajo el agua impone severas restricciones a las comunicaciones tanto por razones de seguridad como por la dificultad técnica que esto entraña).
Con el tiempo, se estimó que el recurso a un sistema totalmente pasivo era insuficiente en según qué escenarios, por lo que se desarrolló el sistema activo de baja frecuencia LFA (Low Frecuency Active), un sonar activo de largo alcance que actúa como el complemento perfecto del sistema original, aunque este también se ha ido afinando con las sucesivas evoluciones.
El primer prototipo de sistema LFA fue instalado en un buque comercial arrendado, el Cory Chouest, que fue asignado al programa de misiones especiales (Navy’s Special Missions Program) de la US Navy de forma provisional, hasta que se produjo la entrega de la primera unidad de una nueva clase, el T-AGOS-23, bautizado como USNS Impeccable.

El propio sistema LFA ha mejorado con el tiempo, desarrollándose una variante más compacta (CLFA) que proporciona mayor capacidad operativa en aguas poco profundas. No es una mejora baladí, sino que se presenta como sumamente útil de cara a la obtención de inteligencia en mares tan importantes como el Báltico y cerca de la costa.
Por otra parte, gracias a su arquitectura abierta es posible seguir incorporando mejoras continuamente. Por ejemplo, a partir de 1996 se iniciaron las pruebas de una variante que utiliza dos sonares remolcados en paralelo, lo que requería importantes modificaciones a bordo. No en vano, el SURTASS original emplea un cable de más de 2,5 kilómetros que debe ser arrastrado a profundidades de entre 150 y 500 metros. Doblar el número de cables obliga a incorporar nuevos sistemas de recogida e izado, algo que no es posible en cualquier buque.

La clase Stalwart
Una vez las pruebas del SURTASS a bordo del buque de investigación Moana Wave terminaron, se hizo necesario alumbrar una clase de buques ad hoc, destinada a operar el nuevo sistema.
Los responsables del programa optaron por un buque de lo más convencional, un monocasco similar a tantos otros buques de investigación oceanográfica, sin embargo, no fue la única posibilidad que se barajó. Para los años 70, cuando se inició la fase de diseño de la clase Stalwart, ya llevaba una década en servicio el R/P FLIP (Floating Instrument Platform), un buque semisumergible que contaba con la particularidad de sumergir la popa con los instrumentos de escucha, dejando la proa en perpendicular a la superficie del mar. Este planteamiento poco usual permite al R/P FLIP, todavía en servicio con la Universidad de San Diego, disfrutar de una estabilidad envidiable, similar a la de una plataforma petrolífera. No obstante, este diseño tenía una desventaja fundamental y lo hacía inviable de cara al uso del SURTASS, ya que una vez en posición, debía mantenerse estático.
Es así como en 1980 comienza la construcción del futuro SNSN Stalwart, que sería botado el 3 de noviembre de 1982 e iniciaría su andadura como buque de vigilancia oceánica en 1984. En los años siguientes se pondrían en servicio nuevos buques de la misma clase, en concreto 17 unidades más, la última puesta en servicio a principios de los 90 y con una vida efímera. De todos ellos, la primera fue construida por la empresa Tacoma Boatbuilding en Tacoma (Washington), mientras que los seis últimos fueron responsabilidad de VT Halter Marine Inc. en sus instalaciones de Moss Point (Mississippi).

Estos buques monocasco contaban con una eslora de 68 metros, una manga de 13 metros y un calado de 4,6 metros, todo lo cual arrojaba un desplazamiento de 2.268 toneladas a plena carga. Su punto fuerte no era la velocidad (apenas 11 nudos), pero eran bastante sigilosos. Su tripulación estaba compuesta por 36 almas entre oficiales, suboficiales y marineros, de los cuales 24 eran civiles y 12 militares, encargados estos últimos de operar los equipos sensibles.
La vida de estas embarcaciones sería desigual, con algunas unidades destinadas, pasado el tiempo, a la lucha contra el tráfico de drogas, otras cedidas a universidades o incluso a otras marinas como la de Portugal, que se quedó con el T-AGOS-11 Audacious y lo renombró como NRP Dom Carlos I (A522), en servicio hasta 1996.

Hay que decir que este programa no fue ajeno al cambio de escenario que se produjo a finales de los ochenta y durante los primeros noventa. Su razón de ser era monitorizar la actividad submarina de las Armada Roja y una vez la Unión Soviética se desintegró, se convirtieron en una de las primeras víctimas de los dividendos de la paz.
Por ejemplo, la última unidad de su clase, el USNS Relentless, que había entrado en servicio el 12 de enero de 1990, apenas unos meses antes del colapso soviético, fue apartado del servicio en 1993 y una vez retirados sus equipos de escucha y de comunicaciones, sería cedido a la NOAA (National Oceanic and Atmospheric Administration) para convertirlo en buque de investigación pesquera.

Otros, como el USNS Worthy (T-AGOS-14), siguieron caminos similares. Fue transferido al Servicio Geológico de los EE. UU. (USGS o United States Geological Survey) y de ahí al US Army, en donde pasó a servir como instrumento de seguimiento de misiles, operando desde la base de pruebas de misiles balísticos Ronald Reagan, en el atolón de las Kwajalein.
Con la Armada Rusa amarrada en puerto y literalmente cientos de submarinos pudriéndose varados en alguna de las muchas bahías del norte y el extremo oriente rusos, contar con una enorme flota de buques de vigilancia ya no era una necesidad. Además, hay que tener en cuenta que a principios de los 90, cuando muchas de las unidades de la clase Stalwart fueron apartadas del servicio, una nueva clase de buques mucho más adecuada para su función estaba ya en construcción…

La clase Victorious
Casi al mismo tiempo que el primer Stalwart entraba en servicio, en la US Navy comenzaron a pensar en un buque más adecuado para sacar partido al SURTASS. Se sabía desde el principio del proyecto que un buque monocasco no era la solución óptima ni en cuanto a emisiones de ruido ni, muy importante, en cuanto a estabilidad.
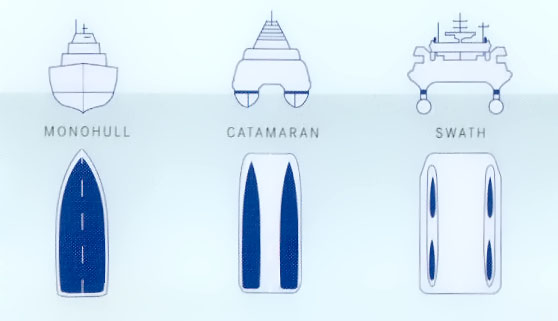
Es así como en 1986 se concede a los astilleros McDermott de Lousiana un contrato para construir el futuro USNS Victorious (T-AGOS-19). Daría nombre a una nueva clase compuesta por cuatro buques, todos ellos con un característico diseño SWATH (Small Waterplane Area Twin Hull), que generalmente tomamos por un catamarán común pero que en puridad es un tipo de buque diferente.

Llegar hasta ahí no había sido sencillo. El USNS Victorious fue el primer buque SWATH de la US Navy y, a pesar de que la elección del constructor apenas llevó seis meses, había muchos desafíos técnicos que superar, poco tiempo para resolverlos y ninguna de las herramientas de diseño había sido validada por completo anteriormente. Otro de los problemas tenía que ver con las resistencias internas; había importantes discusiones en el seno de la US Navy, especialmente por parte del Mando de Sistemas Navales (NAVSEA o Naval Sea System Command), pues no querían que sus esfuerzos de años cayesen en saco roto. Algunos de sus ingenieros llevaban mucho tiempo trabajando en el concepto SWATH y no veían con buenos ojos tener que compartir sus experiencias con empresas privadas.
Hay que entender que en ese momento la comunidad técnica de NAVSEA estaba en su apogeo, compuesta por más de un millar de ingenieros experimentados que no solo diseñaban, sino que prestaban apoyo de ingeniería a los astilleros civiles encargados de construir los por entonces alrededor de 600 buques que contaban en el haber de la US Navy. Sin embargo, pese a sus innegables capacidades, no podían construir, ni tampoco diseñar buques en detalle, por lo que seguían necesitando empresas ajenas a la US Navy para hacer los proyectos realidad.
En un movimiento sin precedentes, diez constructores navales se ofrecieron como voluntarios para unirse al equipo de diseño de NAVSEA, llevándose el gato al agua los astilleros McDermott (actualmente las instalaciones que esta empresa poseía en Louisiana pertenecen a Bollinger). Esta empresa incorporó al diseño final más del 90% de las sugerencias hechas por los técnicos de NAVSEA, que no se demostraron erróneas, pues el Victorious, al igual que sus gemelos, ofreció un rendimiento soberbio, con tasas de operatividad superiores al 80%.
Los SWATH son catamaranes de baja área en la flotación, lo que hace que tengan un comportamiento sobresaliente en cuanto a estabilidad y, por lo tanto, capacidad de operar incluso con mares muy gruesas, dado que las fuerzas de excitación de las olas son pequeñas. Es así, porque los cascos se mueven por debajo de la superficie, aumentando el rozamiento (y limitando la velocidad), pero librándose del efecto desestabilizador del oleaje y el viento en gran parte.

Esto les da una operatividad superior a un monocasco de desplazamiento equivalente, al padecer en mucha menor medida (entre un 20 y un 50% menos) las oscilaciones. Es la razón por la que muchas plataformas de prospección optan por este tipo de diseños (aunque estas suelen ser semisumergibles), ya que les permite operar sus equipos sin preocuparse demasiado del estado del mar.
Como puede suponerse, un buque más estable hace que operar equipos sensibles sea más sencillo, sin embargo, no es la única ventaja; al reducirse los movimientos normales en un buque como el cabeceo o el balance, también se generan menos ruidos que interfieran con los equipos, lo que es beneficioso cuando se trata de escuchar, como es el caso. Además, su baja firma acústica también redunda en la seguridad, ya que hace más difícil la detección por parte de otros buques.
De ahí que los ingenieros de Lockheed Martin optasen por una configuración SWATH a la hora de diseñar el Sea Shadow, de la mano de DARPA, también a principios de los 80, como buque experimental destinado a examinar las aplicaciones navales de las tecnologías furtivas que se habían probado ya en los F-117 Nighthawk.
Por supuesto, no todo son ventajas. A diferencia de otros multicascos, como los catamaranes, en los buques SWATH el interior de los cascos apenas es utilizable. Además, la distribución de pesos en el interior de estos buques ha de estudiarse con mucho más cuidado que en el caso de un monocasco. Por otra parte, requieren de sofisticados sistemas de control que permitan la navegación con seguridad, como la inclusión de aletas en los cascos que controlen el trimado y el cabeceo.

Con todo, las ventajas para un buque de vigilancia oceánica superan a las desventajas, o así lo entendieron al menos los ingenieros norteamericanos encargados de diseñar el relevo de los Stalwart. En efecto, el futuro USNS Victorious (T-AGOS-19), de 3.348 toneladas de desplazamiento a plena carga, es un buque SWATH de 72 metros de eslora, 29 de manga y 7,9 de calado, pensado desde el primer momento para operar el SURTASS. Su propulsión se compone de cuatro motores diésel Caterpillar.
Respecto a sus equipos, el principal es el sonar AN/UQQ-2 SURTASS, complementado una vez más con el sonar activo TL-29A. Además cuenta con radares tanto de superficie como aéreo provistos por Raytheon. Carece de armamento defensivo, dependiendo en todo momento de la escolta proporcionada por otros buques para su defensa. Respecto a su tripulación, está compuesta por entre 24 y 26 civiles, además de entre 8 y 22 militares en función de la misión.

Entregada la primera unidad a la US Navy en agosto de 1991, casi coincidiendo con el colapso soviético, fue sometido a un extenso programa de pruebas que debía confirmar sus virtudes en relación a los buques a los que sustituyen. Para ello, se instaló un Sistema de Adquisición de Datos (CDAS o Core Data Acquisition System) que debía obtener información durante las pruebas hidrodinámicas, estructurales y acústicas. Las pruebas de mar se prolongaron durante el resto de 1991 y la primera mitad de 1992 en el Atlántico Norte y durante al año y medio siguiente en el Pacífico Norte, concluyendo frente a Hawái en abril de 1993, demostrando el Victorious ser un barco muy marinero capaz de trabajar incluso con estado de mar 7 en la escala de Beaufort.
Respecto a su vida operativa, es muy poco lo que ha trascendido, algo lógico toda vez que sus misiones son secretas. El USNS Victorious sigue en servicio, casi treinta años después de ser dado de alta, por lo que requiere de un pronto relevo (en breve hablaremos del T-AGOS-X). El USNS Able (T-AGOS-20), por su parte, pasó a la reserva en agosto de 2004, cuando apenas contaba con 12 años de servicio en sus cuadernas. Una víctima más de la unipolaridad que, no obstante, tres años después tuvo que ser actualizado y reactivado ante la emergencia de nuevas amenazas, siendo destinado como su hermano mayor al Pacífico desde 2008. El USNS Effective (T-AGOS-21) ha venido sirviendo desde 1993 sin descanso y, lo que es más significativo, sin que hayan aparecido informaciones sobre el mismo en todos estos años. No obstante, se sabe que su tripulación fue condecorada con la National Defence Service Medal, entendemos que por participar de alguna manera en la War on terror. Por último, el USNS Loyal (T-AGOS-22) ha servido desde julio de 1993 sin contratiempos, estando basado actualmente en la base de Sasebo, en la Prefectura de Nagasaki, al sur de la isla de Kyushu. Su misión, evidentemente, es la de monitorizar las emisiones submarinas tanto chinas como norcoreanas y rusas, no en vano esta base está situada en una ubicación inmejorable, cerca del estrecho de Tsushima que separa el Mar de China Oriental y el Mar Amarillo del Mar de Japón y permite un acceso rápido hacia el Mar de Filipinas y el Pacífico Norte.

La clase Impeccable
Aunque es una clase independiente de la anterior, por más que conste de un único barco, el USNS Impeccable y los que debían haber sido sus gemelos (originalmente se contemplaba construir una serie de cuatro buques), apenas suponen una evolución de los Victorious de mayor tamaño, lo que permite mayor autonomía y estabilidad si cabe y también trabajar de forma aún más desahogada. El proyecto para construir del T-AGOS-23 al 27 llegó a estar muy avanzado, hasta el punto de que se llegaron a reservar los 525 millones de dólares que se estimó costaría su construcción. No obstante, una vez construida la primera unidad una nueva evaluación sobre las amenazas submarinas y algunos problemas con el desarrollo del conjunto SURTASS-LFA hicieron el resto, recomendando la Oficina de Cuentas en diciembre de 1992 no proseguir con el resto de buques.
(Continúa…) Estimado lector, este artículo es exclusivo para usuarios de pago. Si desea acceder al texto completo, puede suscribirse a Revista Ejércitos aprovechando nuestra oferta para nuevos suscriptores a través del siguiente enlace.
IMPORTANTE: Las opiniones recogidas en los artículos pertenecen única y exclusivamente al autor y no son en modo alguna representativas de la posición de Ejércitos – Revista digital sobre Defensa, Armamento y Fuerzas Armadas, un medio que está abierto a todo tipo de sensibilidades y criterios, que nace para fomentar el debate sobre Defensa y que siempre está dispuesto a dar cabida a nuevos puntos de vista siempre que estén bien argumentados y cumplan con nuestros requisitos editoriales.
Be the first to comment