

Los vehículos submarinos son una realidad cada vez más común. Los avances logrados en los últimos años y los nuevos modelos en fase de pruebas nos permiten aventurar, sin miedo a equivocarnos, que determinarán el devenir de la guerra naval en las próximas décadas. A lo largo de las próximas líneas os ofrecemos una completa visión de su evolución histórica, sus funciones y los modelos actualmente en servicio y en pruebas.
Cuentan que el origen del submarino se remonta a Carlomagno, cuando este intentó explorar el fondo marino metido en una gran esfera de cristal. No sabemos si fue cierto, las crónicas lo afirman y tenemos pruebas documentales, supongo que en esa época no se seguiría un proceso tan exhaustivo como ahora y los sistemas utilizarían el método de prueba y error.
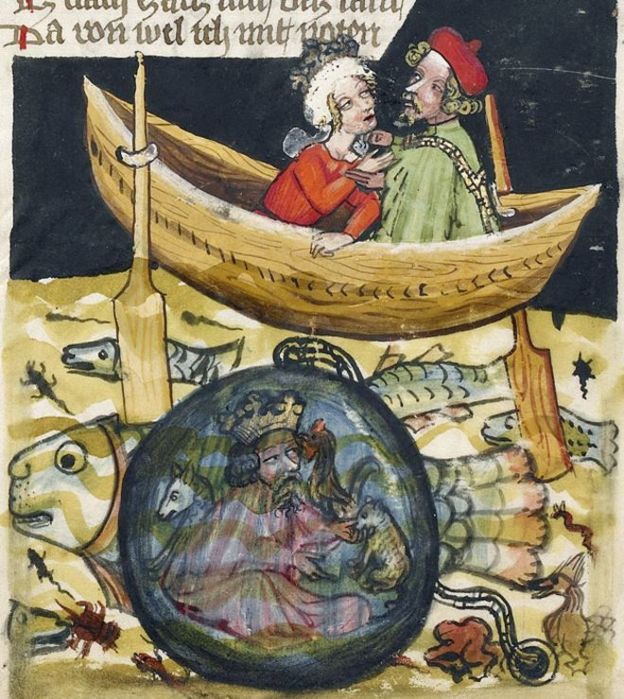
Según una de las versiones gráficas que han llegado a nuestros días, el gran conquistador se sumergió en el agua metido en una campana de vidrio y se llevó consigo tres criaturas: un perro, un gato y un gallo. Dicha campana también era unmanned, aunque Carlomagno fuera dentro, pues la esfera era manejada desde la superficie por su amante[1].
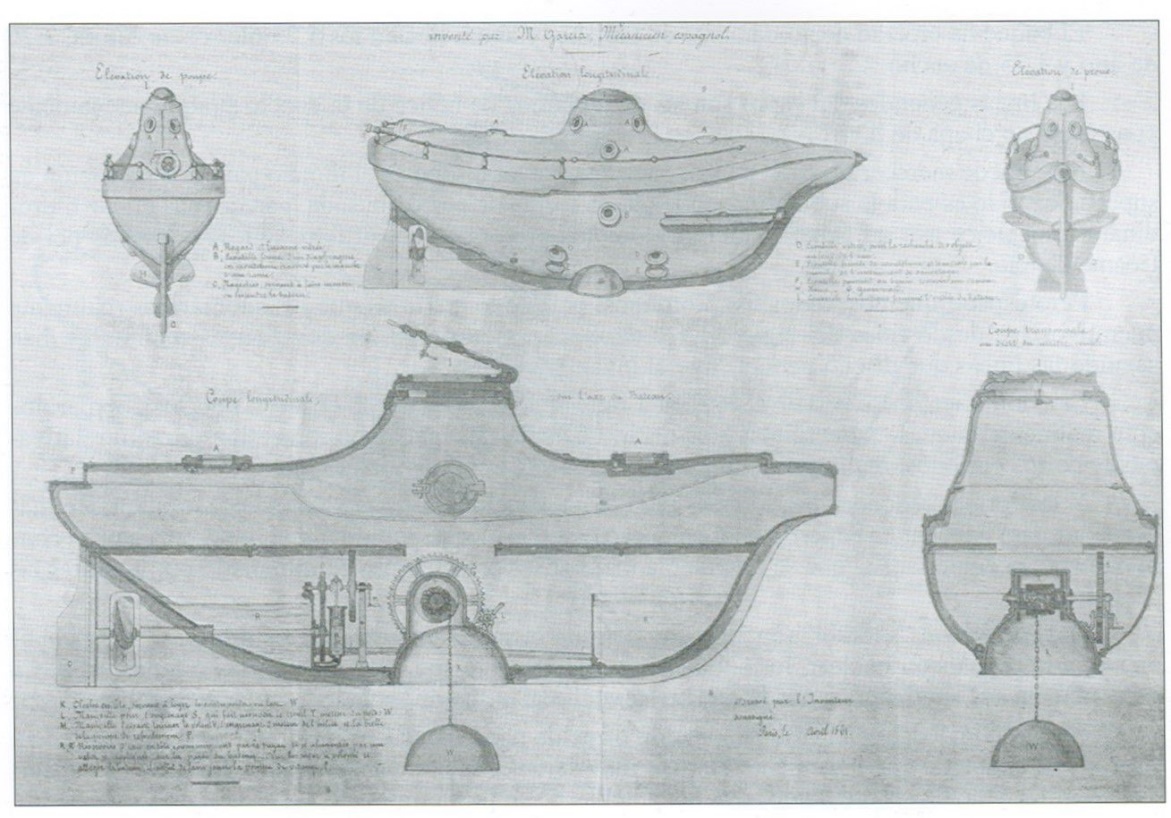
Llegamos al siglo XIX con diferentes intentos, algunos más fructíferos que otros, y España a la cabeza de esos inventos. No sólo Isaac Peral, también tuvimos a Narciso Monturiol y su barco pez, un sistema que pasó numerosas pruebas, o a Cosme García y su Garcibuzo. El segundo de los garcibuzos sería probado con éxito en el puerto de Alicante, donde quedaría abandonado y terminaría hundido por uno de sus hijos al no poder afrontar el pago del amarre[2] (Rodríguez González, 2015).
Narciso Monturiol fue también el primero en escribir sobre el problema de la navegación submarina[3]. Según él y tal como nos describe en su Ensayo sobre el arte de navegar por debajo del agua (Monturiol, 1891):
“La resolución del problema de la navegación submarina, estriba en la construcción de un aparato que sea capaz de descender dentro del mar, de detenerse donde quiera, de moverse en todas direcciones, de volver á la superficie y de navegar por ella; que pueda estar indefinidamente sumergido sin que esté en comunicación con la atmósfera”.
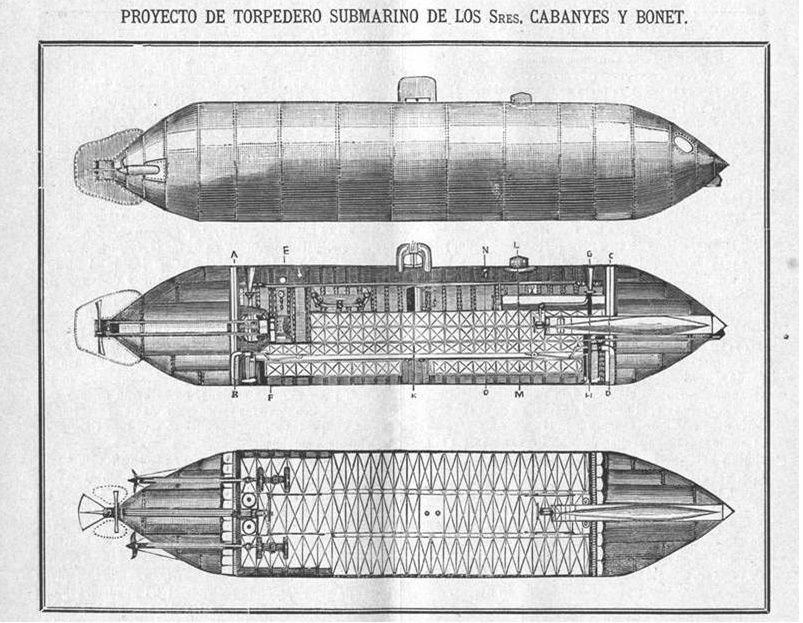
También tuvimos a Isidoro Cabanyes, un artillero del que ya tuve la ocasión de escribir un artículo para la Revista General de Marina. Cabanyes, coetáneo de Peral, realizó un proyecto de submarino eléctrico completamente funcional que incluso tenía medidas para absorber el CO2. No solo en el campo del submarino Cabanyes es otro de los grandes ilustrados de nuestras Fuerzas Armadas, a él le debemos el primer motor solar (Conte de los Ríos, 2012).
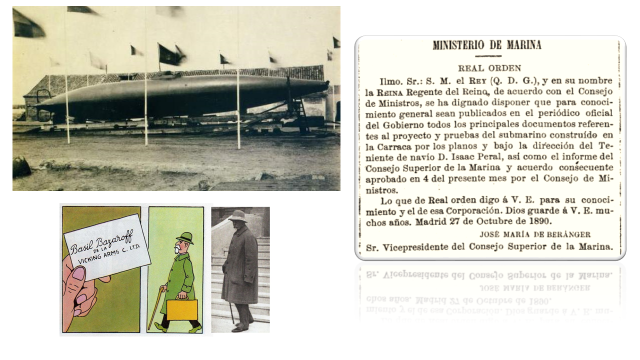
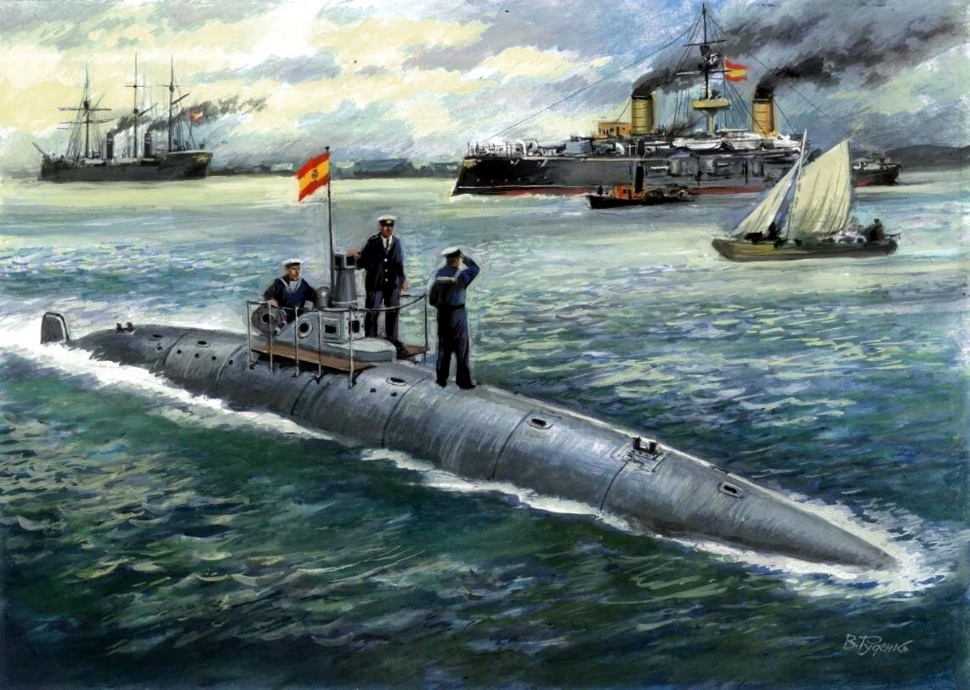
Sobre Isaac Peral se ha escrito mucho y no vamos a hacerlo de nuevo aquí. Solo decir que su proyecto estuvo gafado por la incomprensión de algunas autoridades de la Armada y un gobierno mal asesorado, donde confiaban más en ingenieros extranjeros, a sueldo de la todopoderosa Vickers, que en un simple teniente navío. No solo gafado, además sufrió la traición de ver publicado todo su trabajo, un trabajo que hizo con esmero y sacrificio; junto a un reducido grupo de oficiales de Cuerpo General participó en unas pruebas secretas que saldrían a la luz en la Gazeta de Madrid[4].
Al repasar la documentación podemos comprobar como Isaac Peral, sin ser ingeniero, programó un exhaustivo calendario de pruebas que incluían el lanzamiento de torpedos en inmersión, primero en el Dique de la Carraca y más tarde en la Bahía de Cádiz, contra el crucero Colón.
Después del Peral, España solo ha tenido programas de submarinos diseñados por otros países; Holanda en el caso de la serie D, Alemania en el caso del submarino construido por los astilleros Echevarrieta de Cádiz E-1, único construido fuera de Cartagena, los Foca y Tiburón, también alemanes, o el intento fallido de la serie G basada en el éxito de la Kriegsmarine, la clase VII-C (Ramírez Gabarrús, 1983).
Después de la Guerra Civil y llegados a 1970, llegarían los submarinos franceses con las series 60 y 70, y más tarde la clase Scorpène, el mejor submarino construido hasta ahora por la empresa Navantia, antigua Izar, Bazán o Sociedad Española de Construcciones Navales, una empresa que nacía a la sombra de los Reales Arsenales de Carlos III y que podemos considerar como un apéndice de la Armada (Quevedo Carmona & Martínez García, 2000).
Tendremos que irnos al siglo XXI para llegar al S-80, segundo submarino de diseño completamente español tras el Peral, un submarino con una enorme incertidumbre detrás y que va a costar sacar adelante, solo el programa va a costar unos 1.000 millones de euros por unidad, sin contar el ciclo de vida.
El único submarino que se le acerca es la serie D, bajo la dirección de D. Áureo Fernández Ávila y la asistencia del holandés Hans Techel (Ramírez Gabarrús, 1983). La serie D supondría el mayor intento de repetir la hazaña de nuestro insigne inventor, el teniente de navío D. Isaac Peral y Caballero, poco reconocido y que en palabras del almirante Dewey, vencedor de Montojo en Cavite, hubiera supuesto ser trascendental en el conflicto hispanoamericano de 1898: “Si España hubiese tenido un solo submarino de los inventados por Peral, yo no hubiese podido sostener el bloqueo ni 24 horas”, palabras en referencia al conflicto que nos enfrentó a los Estados Unidos y que supondrían la pérdida de las últimas colonias y el fin de España como potencia.
Terminar esta introducción histórica con otro detalle del conflicto de 1898 y que recordaremos cuando hablemos de las misiones de nuestro vehículo submarino no tripulado. Nada más comenzar el conflicto, el ejército de los Estados Unidos mandó cortar los cables telegráficos submarinos que permitían la comunicación con la Metrópoli, recordemos que todavía no había llegado la radio a nuestras unidades. El Lt. Cameron McRae Winslow escribiría:
“Cable cutting was something new to all of us and I did not know just how to manage it. To tell the truth, I didn’t have the faintest idea of the work”[5].
El cable se cortó con éxito al igual que el que había entre Manila y Hong Kong, dejando a Montojo y a Cervera incomunicados[6]. Los esfuerzos de Estados Unidos por aislar las colonias de Madrid, no fueron simples operaciones que se le ocurrieron a algún oficial de transmisiones, respondían a un plan previo y suponían un enorme inconveniente para nuestras defensas, tanto que demuestra que el Maine fue una trampa[7].
Estas acciones en tiempos de guerra, antes y ahora, proporcionan un importante precedente y una lección para el futuro, donde países beligerantes y no beligerantes pueden ver como sus cables submarinos pueden ser víctima del sabotaje de un económico vehículo submarino, pasemos a hablar de ellos.
El origen de los vehículos submarinos no tripulados
La palabra inglesa unmanned se traduce como “vehicles such as spacecraft do not have any people in them and operate automatically or are controlled from a distance”. Si le sumanos las palabras underwater y vehicle, llegamos al objeto de este trabajo, la búsqueda de un vehículo submarino no tripulado que nos permita trabajar con un arma que pueda servir para múltiples misiones, controlado desde la distancia[8].
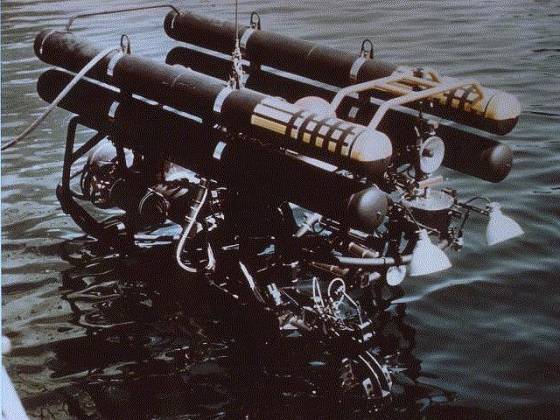
España también tuvo un papel protagonista respecto a los vehículos submarinos no tripulados, ya que el primer vehículo de la era moderna se utilizó por primera vez en una operación real en nuestras aguas, en el accidente de Palomares[9]. Recordemos el incidente nuclear, el 17 de enero de 1966 un avión cisterna y un B-52 colisionaron en vuelo en una maniobra de reabastecimiento, lo que provocó el desprendimiento y la caída de las cuatro bombas termonucleares que transportaba el B-52.
Se recuperaron inicialmente tres de ellas que cayeron en tierra; una quedó intacta protegida por un paracaídas y las otras dos se rompieron en pedazos esparciendo elementos radiactivos en la zona que todavía se siguen recuperando. La cuarta también cayó intacta, pero tardaron 80 días en recuperarla y para ello hizo falta el uso de un Vehículo de Recuperación Submarina controlado por Cable o CURV (del inglés Cable-controlled Undersea Recovery Vehicle), el llamado CURV-1 (Pierson, 2009).

El CURV-1 se considera el primer ROV operativo. Este robot, desarrollado en 1960 por la Marina de los Estados Unidos, se hizo muy famoso cuando consiguió recuperar la bomba de hidrógeno lanzada accidentalmente desde el B-52 frente a Palomares[10] (Ridao, Carreras, Hernandez, & Palomeras, 2007).
En 1973 su sucesor, el CURV-3, realizaría el rescate submarino más profundo de la historia cuando salvó a los tres hombres del Piscis III que estaban sin aire a 480 metros de superficie, tras 76 horas angustiosas y casi sin reservas. El Piscis III era un sumergible comercial canadiense utilizado precisamente para instalar cables submarinos[11] (Walsh, 1999).
En los últimos años, la tecnología robótica submarina se ha aplicado en diferentes escenarios de aplicación, siendo la exploración o la intervención de los fondos marinos la más clásica. Los vehículos submarinos no tripulados, o UUV (del inglés Unmanned Underwater Vehicles), son vehículos capaces de operar debajo el agua sin la necesidad de que un humano ocupe físicamente el vehículo. Se pueden dividir en dos categorías principales: Vehículos operados remotamente o ROV (del inglés Remotely Operated Vehicle) y Vehículos Submarinos Autónomos o AUV (del inglés Autonomous Underwater Vehicles).

Un ROV es un vehículo submarino pesado que suele ser desplegado desde una nave nodriza al que une un cable umbilical y un cable de acero que mantiene la tensión, gracias a un cabrestante hidráulico. El barco debe estar equipado también con un sistema dinámico de posicionamiento para mantener su posición durante la operación ROV. El robot está conectado a la consola de control instalada en el buque nodriza gracias al umbilical que proporciona energía, datos y canales de vídeo.

Para el funcionamiento del robot, se necesita un sistema de navegación para conocer la posición del mismo, cámaras, focos para proporcionar luz en el fondo, sónares y un par de brazos articulados, uno para movimientos finos y otro para los movimientos que requieran fuerza para mover objetos.
Para el enlace acústico existen diversas alternativas basadas en el uso de transpondedores (LBL o USBL). Desde el punto de vista de la robótica, se utilizan estrategias sencillas que implican el control de bucle cerrado mediante un joystick para operar el ROV, dejando el manejo de los sensores a un segundo operador.
Ejemplo de estos sistemas es el Liropus, un ROV del Instituto Español de Oceanografía (IEO) utilizado en labores de arqueología subacuática durante las campañas de Nuestra Señora de las Mercedes, realizadas en colaboración del Museo ARQUA y la Armada Española, habiendo participado el autor en la segunda de estas campañas a bordo del buque oceanográfico Ángeles Alvariño. Durante esa campaña en 2016 se obtuvo el record de intervención subacuática en España, recuperando cañones y diversos objetos de un pecio que se encuentra a 1.100 metros de profundidad (Negueruela Martínez, 2016).

El segundo escenario aparece cuando la estación del piloto del ROV no se encuentra en el buque nodriza, sino en otra parte del mundo. Este es el caso del experimento llevado a cabo desde Roma que permitió manejar un ROV través de internet mientras exploraba la fauna bentónica bajo el hielo de la Antártida. En este caso, un canal de comunicaciones satélite de 64 Kbps conectaba el sistema de control del robot en la Antártida a un servidor web ubicado en Génova y de allí al resto del mundo a través de internet[12] (Bruzzone, Bono, Caccia, Coletta, & Veruggio, 2003).
El tercer escenario surge cuando se quita el cable umbilical y las comunicaciones se sustituyen con un módem acústico cuando el vehículo se encuentra debajo del agua y por una pequeña antena de VHF o satélite cuando el vehículo se encuentra en superficie. Ahora el desafío es la baja velocidad en la transmisión del enlace a cota profunda (aprox.10 Kbps) y el alcance que depende de las condiciones batitermográficas del agua (aprox. 500 metros de alcance).
Sin duda se trata de un canal muy poco fiable por lo que se deben dar órdenes al vehículo para que vuelva a superficie o a una posición de espera, como es en el caso de los UAV (del inglés Unmanned Air Vehicles). Para hacer frente a estas restricciones, los investigadores proponen sistemas de comunicaciones muy básicos donde las órdenes sean sencillas, es necesaria cierta autonomía. En este caso hablamos de Vehículo Autónomo Submarino o AUV (del inglés Autonomous Underwater Vehicle).

El ejemplo de este tercer escenario lo tenemos en un artículo publicado recientemente, en él se da cuenta de cómo se operó un UUV desde un vehículo de superficie no tripulado o USV (del inglés Unmanned Surface Vehicle). Para este experimento se ha utilizado una nueva clase de buque de superficie no tripulado, llamado SEA-KIT (ver figura 12), diseñado y construido para poder cumplir con esas tareas[13].

El SEA-KIT está equipado con una moderna sonda multihaz de aguas profundas que le permite obtener datos batimétricos desde superficie. También está equipado con el sistema de transporte, largado, recogida y posicionamiento autónomo de un AUV, un sistema que permite cartografiar con detalle, y realizar intervenciones subacuáticas en aguas profundas, sin necesidad de la presencia física del hombre, ya que todo el sistema se maneja desde la distancia, gracias a un potente sistema de comunicaciones satélite que lleva el SEA-KIT.
El AUV elegido es el HUGIN, una plataforma muy versátil. En este caso llevaba un Sónar de Apertura Sintética de Alta Resolución HISAS 1032 que proporciona cobertura sobre gran anchura de franja y una ecosonda multihaz EM 2040 (MBES), cubriendo la brecha del ecosonda del USV SEA-KIT. El AUV HUGIN es una opción ya probada, un robusto vehículo de aguas profundas utilizado por instituciones científicas de todo el mundo, empresas de intervención subacuática y también por muchas marinas.
Submarino o vehículo submarino
El submarino desde la Primera Guerra Mundial ha demostrado su valía, desplazando a los acorazados como Capital Ship (Frere, 1993). La llegada de los drones ha sido la siguiente revolución y en la actualidad las principales armadas cuentan en sus arsenales con algún tipo de vehículo submarino no tripulado[14] (Calfee, 2018).
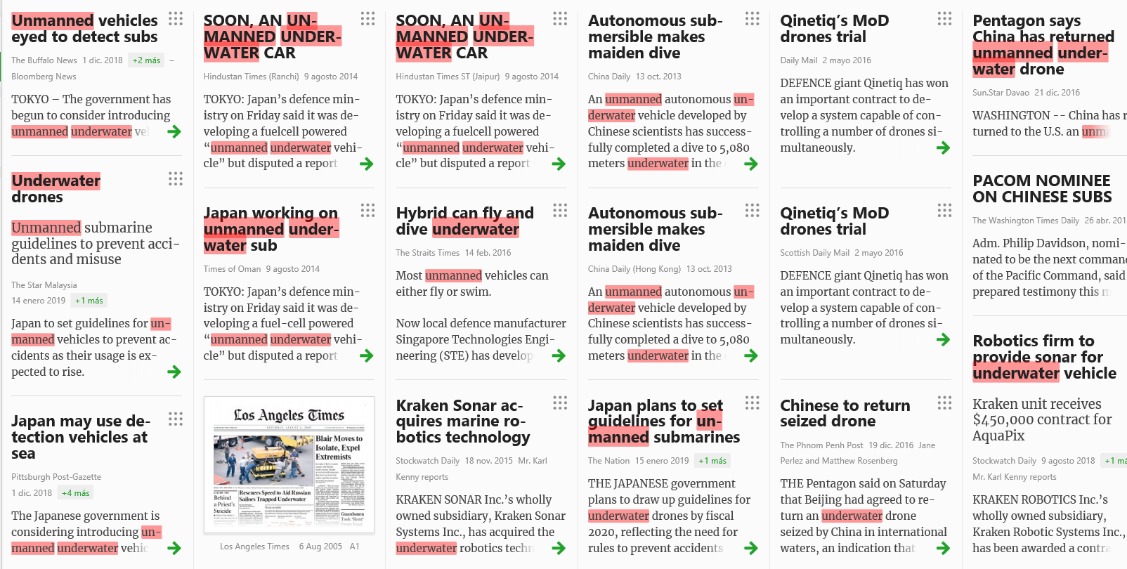
Si hacemos un repaso a la prensa, vemos que este tipo de vehículos ya está siendo empleado en la Marina de los Estados Unidos (US Navy) que cuenta con un ambicioso plan para incorporarlos plenamente a sus flotas[15] e incluso ya ha sufrido la pérdida de algunas de estas unidades, una en China y otra en Yemen[16] (ver imagen siguiente). En 2017, la Marina de los Estados Unidos crea su primer escuadrón de vehículos submarinos[17]con un programa de 279 millones[18] de dólares a cargo de la US Navy Unmanned Maritime Systems Program Office[19] (Holmes 2016).

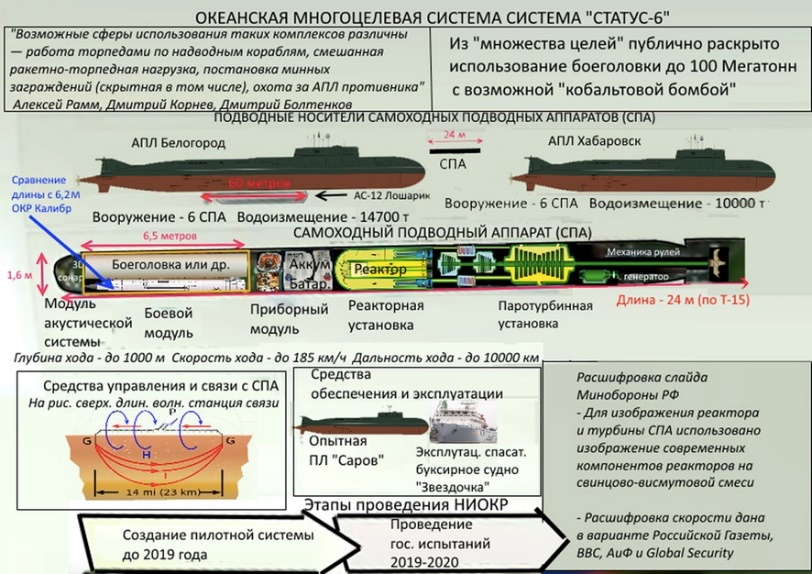
Rusia tampoco se ha quedado atrás; está desarrollando vehículos submarinos como protección de sus submarinos e incluso ha desarrollado un vehículo propulsado con energía nuclear y con capacidad de llevar una ojiva, también nuclear[20] (ver imagen siguiente) (Geist 2016).
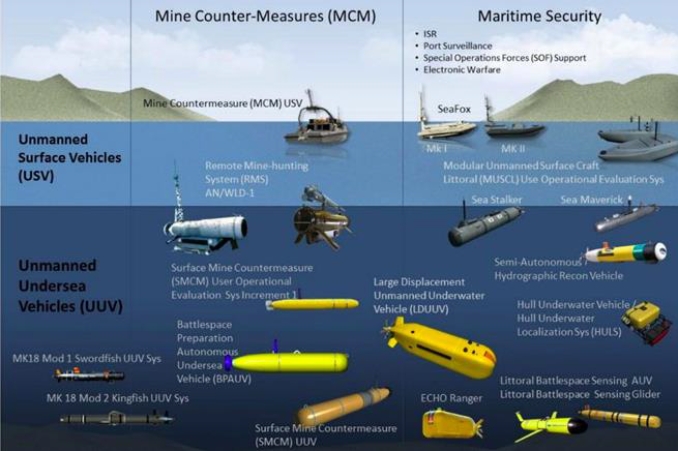
Vemos como los buques autónomos y no tripulados se están convirtiendo rápidamente en una realidad, en un esfuerzo por hacer que la guerra en el mar sea más segura y eficiente para nuestros soldados. Sin embargo, las líneas tradicionales basadas en la función y la escala se difuminan a medida que las nuevas tecnologías cambian la forma en que se satisfacen las necesidades únicas de los diferentes sectores.
En este artículo se examinará qué sistema debe tener la Armada Española para su integración en los nuevos submarinos serie S-80 que está construyendo Navantia y cuya entrega está prevista en 2022 con el primer submarino de la serie, el S-81 Isaac Peral (ver imagen siguiente).

El desarrollo actual de la tecnología va a permitir en un corto plazo de tiempo tener sistemas UUV compatibles con nuestros submarinos[21]. Esto proporcionará una enorme ventaja a nuestra serie S-80, modernos submarinos que al ser dotados con UUV podrán realizar misiones aún más sigilosas, atacar u obtener inteligencia de zonas hasta ahora prohibidas, misiones de vigilancia, reconocimiento e inteligencia (ISR), así como tareas de apoyo a las operaciones especiales con la topografía y detección de barreras de seguridad en aguas hostiles.

Las características de nuestras aguas, especialmente en el estrecho de Gibraltar donde nos podemos encontrar hasta corrientes de 7 nudos[22], obligan a contar con un vehículo grande. Un vehículo que proporcione una velocidad mínima de 5 nudos y pueda mantenerse en patrulla durante un tiempo prolongado.
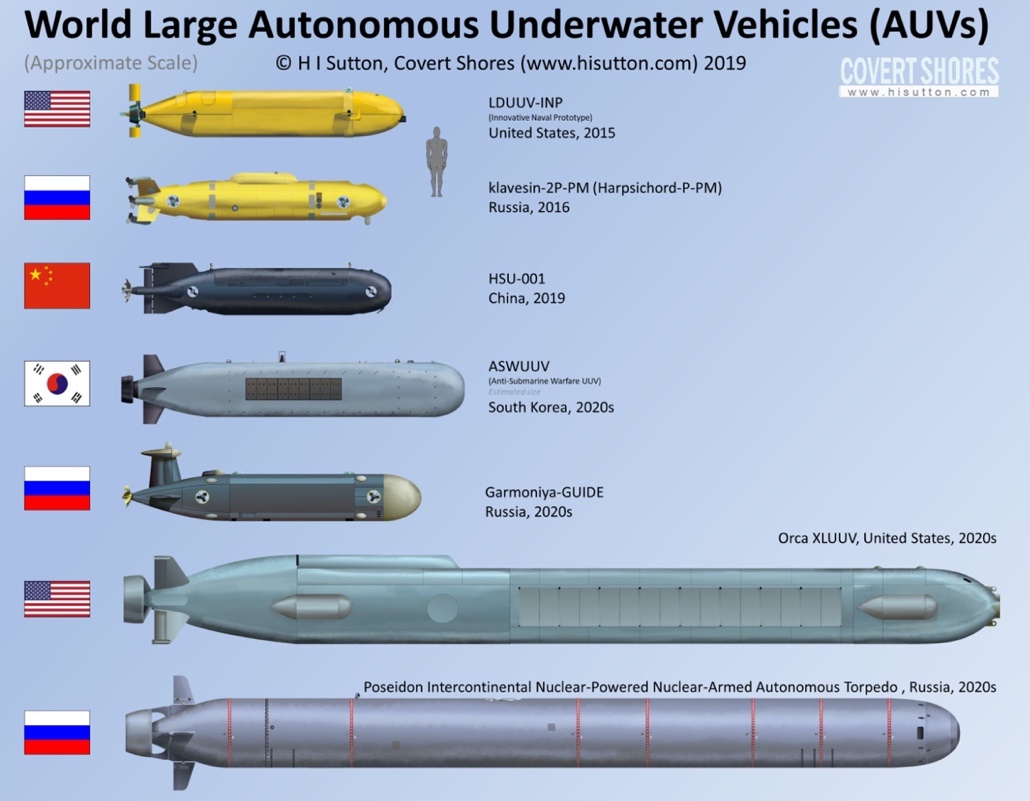
Los programas de UUV actualmente en curso en países del entorno, obligan a pensar también en un futuro vehículo de tamaño grande[23]. Boeing con su filial Huntington Ingalls Industries entregará próximamente cinco vehículos submarinos no tripulados extragrandes clase Orca[24], vehículos del tipo XLUUV (Extra Large UUV).

El Reino Unido está también explorando opciones para el desarrollo de un XLUUV[25] para llevar a cabo misiones encubiertas a distancias de hasta 3.000 millas náuticas durante tres meses. Según su ministerio de Defensa[26]:
“Developing and testing the potential capability to deliver these future operational requirements is not possible with current Royal Navy assets and requires research and development of a larger more payload-flexible autonomous test system in partnership with commercial suppliers.”
España puso en marcha su Programa Barracuda el pasado año 2019, un programa en el que en principio se ha quedado fuera la Flotilla de Submarinos ya que, hasta la fecha, el concepto de UUV estaba pensado para misiones de Guerra de Minas, levantamientos hidrográficos y labores donde se empleaban vehículos de tamaño pequeño o mediano (Núñez de Prado Aparicio, 2020).
El concepto que aquí buscamos es el de un vehículo más grande, un sistema que apoye al submarino y se integre como capacidad del Arma Submarina para realizar misiones de guerra antisubmarina o cualquiera de las muchas otras misiones que tienen actualmente el submarino y se puedan hacer con un LUUV[27] (Allen & Allen, 2018; Conte de los Ríos, 2018).
¿Para qué un vehículo submarino?
Hemos visto como un LUUV podría incrementar la capacidad del Arma Submarina a un precio bastante reducido. Nuestro LUUV podría ser transportado de manera encubierta por los nuevos submarinos S-80, operar de forma autónoma y regresar después al submarino nodriza.
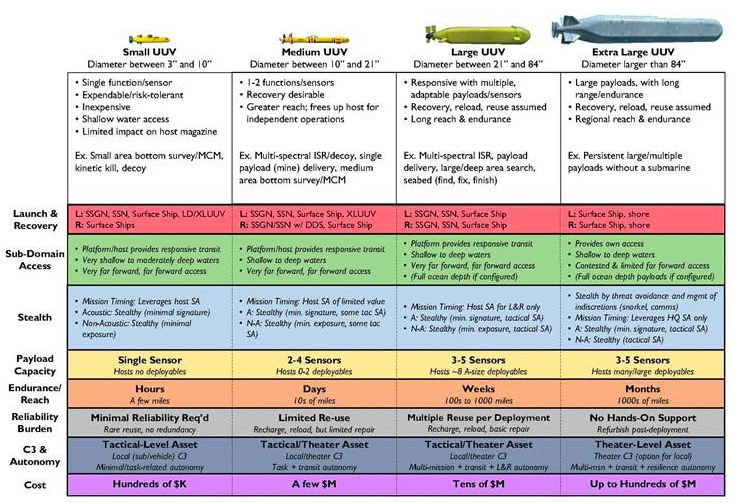
Esto requiere de un sistema de control en tierra, el LUUV contaría con una autonomía de semanas y hasta 1.000 millas. Durante este período el LUUV podrá detectar cualquier contacto hostil, identificarlo y pasarlo a la estación que podrá informar al submarino nodriza para poder atacarlo.

El sistema que buscamos debe ser un sistema de prueba, que permita futuros desarrollos, para ello debe contar con una arquitectura abierta que admita la integración de sistemas de terceros, sistemas independientes a la empresa que desarrolle el vehículo, tanto para elementos de control y operación, como para elementos que admita su carga útil.
Mediante una revisión de la literatura existente y de los sistemas que se conocen se propondrá el tipo de vehículo más idóneo, sin realizar cambios estructurales al diseño actual del submarino en su configuración actual S-80 Plus.
Este análisis permitirá abordar una propuesta de I+D+i a realizar por las principales empresas españolas que, hasta ahora, no aparecen en este prometedor mercado.
¿Quién tiene este tipo de vehículos?
Para el estudio se han seleccionado en fuentes abiertas los LUUV y XLUUV que existen en la actualidad. Para esta búsqueda se ha aprovechado un trabajo previo del autor para el Instituto Español de Estudios Estratégicos titulado: “El vehículo submarino autónomo de la Armada Española” (Conte de los Ríos, 2018).
Se ha realizado un estudio del Programa de la OTAN MUS (acrónimo de Maritime Unmanned Systems) dirigido desde el Centre for Maritime Research and Experimentation (CMRE) que se encarga del estudio de las posibles soluciones a futuros sistemas no tripulados a nivel de la OTAN[28].
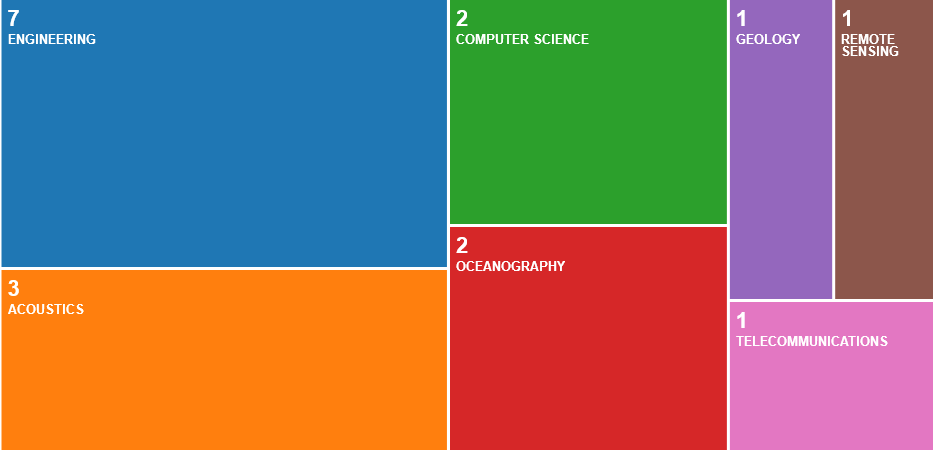
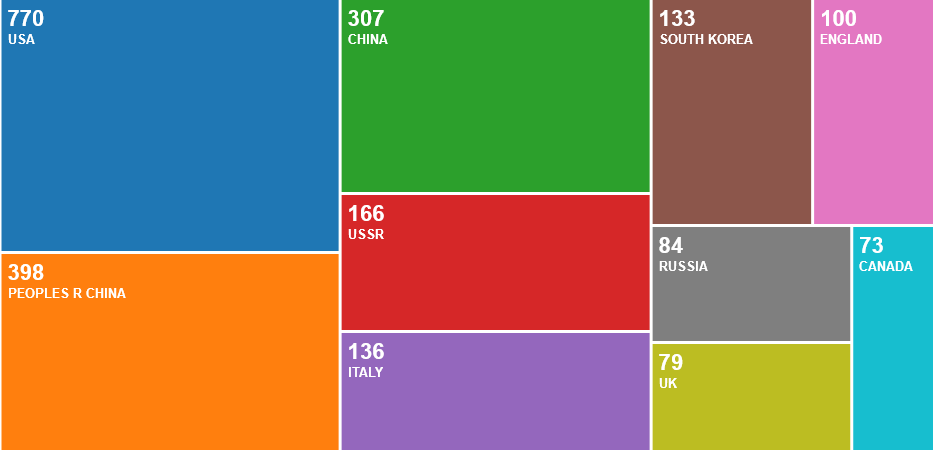
También se ha hecho una búsqueda en fuentes abiertas OSINT (del inglés Open Sources Intelligence), centrando la búsqueda en vehículos grandes dadas las características que queremos de él. Esto restringe la búsqueda a un reducido número de países, lo que facilitará posteriormente el trabajo para seleccionar las preferencias de nuestros expertos. Vemos que solo China, Corea del Sur, Estados Unidos, Reino Unido y Rusia disponen de vehículos grandes.
Sistemas de la US Navy
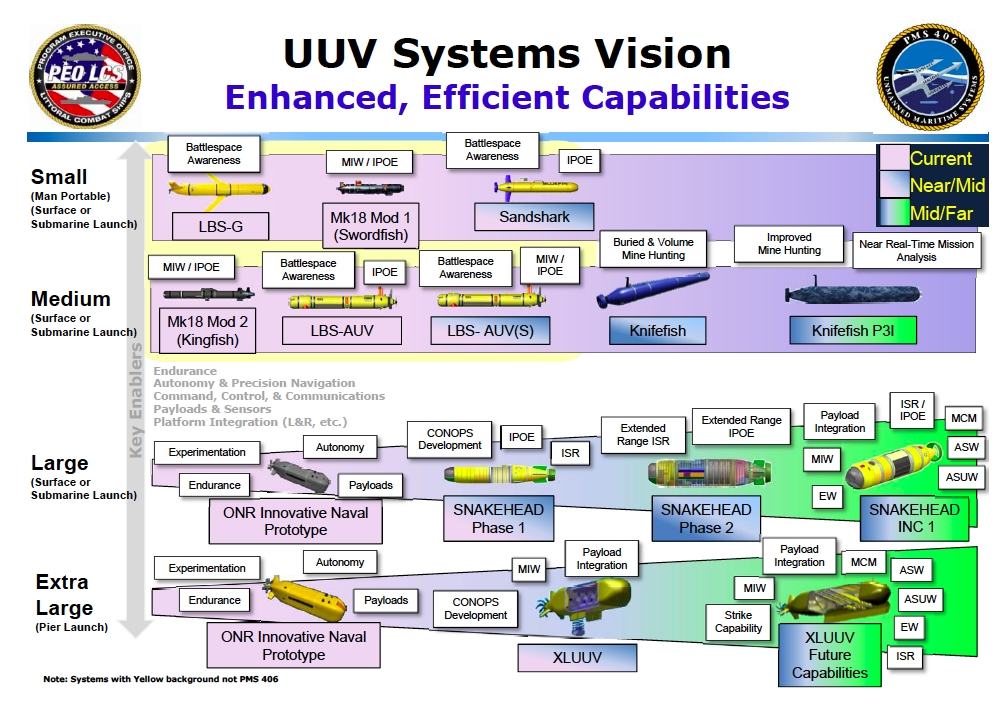
La Marina de los Estados Unidos ha adjudicado un contrato a Boeing por un valor de 274,4 millones de dólares para producir cinco vehículos submarinos no tripulados Orca (XLUUV)[29]. Este vehículo está basado en el Echo Voyager, también de Boeing, un drone de 15,5 metros de eslora preparado para la guerra de minas, guerra antisubmarina, guerra antisuperficie, guerra electrónica y misiones ISR[30].
La Marina de los Estados Unidos ha querido aumentar su Plan UUV[31] con un vehículo de este tamaño[32], buscando un vehículo de mayor alcance y de mayor resistencia para operar a través de todos los océanos del mundo de forma totalmente autónoma (Burgess, 2017). Su visión es que los ORCA sean desplegados desde una de sus bases, desplazándose luego de manera autónoma hasta la zona de operaciones, donde se quedarían merodeando, enlazando por comunicaciones, realizando su misión y después regresaría a su base por sus propios medios[33].
Los UUVs tácticos más pequeños que han estado utilizando requieren de un buque de apoyo tripulado cerca, perdiendo furtividad[34]. También se han visto comprometidos al ser capturados en aguas de Yemen o China. En octubre de 2017, la Armada de los Estados Unidos seleccionó a Boeing y Lockheed Martin[35] para el diseño del Orca, y en febrero adjudicó a Boeing una modificación de contrato ampliando hasta cinco el número de UUVs[36].
(Continúa…) Estimado lector, este artículo es exclusivo para usuarios de pago. Si desea acceder al texto completo, puede suscribirse a Revista Ejércitos aprovechando nuestra oferta para nuevos suscriptores a través del siguiente enlace.
IMPORTANTE: Las opiniones recogidas en los artículos pertenecen única y exclusivamente al autor y no son en modo alguna representativas de la posición de Ejércitos – Revista digital sobre Defensa, Armamento y Fuerzas Armadas, un medio que está abierto a todo tipo de sensibilidades y criterios, que nace para fomentar el debate sobre Defensa y que siempre está dispuesto a dar cabida a nuevos puntos de vista siempre que estén bien argumentados y cumplan con nuestros requisitos editoriales.
Be the first to comment